

Downloads
Download



This work is licensed under a Creative Commons Attribution 4.0 International License.
Review
A Review of Multi-vehicle Cooperative Control System in Intelligent Transportation
Songtao Xie 1, Zhenhong Li 1, Farshad Arvin 2, and Zhengtao Ding 1,*
1 Department of Electrical and Electronic Engineering, The University of Manchester, Manchester M13 9PL, UK
2 Swarm & Computational Intelligence Laboratory (SwaCIL), Department of Computer Science, Durham University, Durham DH1 3LE, UK
* Correspondence: zhengtao.ding@manchester.ac.uk
Received: 25 April 2023
Accepted: 19 September 2023
Published: 25 September 2023
Abstract: Multi-vehicle cooperative control (MVCC) system has the potential to improve traffic flow, reduce congestion, and increase safety. This paper reviews the progress achieved by researchers worldwide regarding different aspects of MVCC systems. Research works of MVCC system architectures and strategies are reviewed, which explain how this system works. Several control methodologies utilized in the MVCC system and their related issues are discussed and compared, and research achievements about string stability and system degradation caused by unreliable communication are also reviewed. Applications of the MVCC system are demonstrated with detailed literature, which draws an overall landscape of the MVCC system and points out current opportunities and challenges. Finally, future research directions for the MVCC system are proposed based on the latest social and technological developments.
Keywords:
multi-vehicle cooperative control cooperative adaptive cruise control distributed control1. Introduction
In the past few decades, with the acceleration of urbanization, traffic congestion, and frequent traffic accidents have become serious problems facing many large cities. With the development of vehicle-to-vehicle (V2V) communication and advanced driving assistance system (ADAS), the multi-vehicle cooperative control (MVCC) system has become possible and attracted widespread attention. In an MVCC system, vehicles optimize their driving routes, avoid collisions and congestion, and improve traffic efficiency and safety through communication and cooperation. For example, vehicles can communicate with each other using wireless communication devices to obtain information such as the position, speed, and driving direction of other vehicles, thereby better coordinating their driving routes. In the MVCC system, the common method is to use the network-connected distributed control method. This kind of distributed control technology is based on the cooperation between multiple agents, which agent can be different vehicles, traffic lights, or other control devices. In a network-connected distributed control system, each agent only needs to understand the state information of its adjacent agents to complete local decision-making and ultimately achieve the global control goal. Network-connected distributed control technology can improve the efficiency and robustness of traffic control, making the MVCC system more reliable.
Since the early 20th century, research institutions and automobile manufacturers have been investigating MVCC systems. Starting in 1986, the University of California, Berkeley launched the California Partners for Advanced Transportation Technology (PATH) project, which focused on intelligent transportation systems and advanced transportation technology. In the early stages of the project, PATH developed and evaluated a strongly coupled platoon system, demonstrating the feasibility of the MVCC system and providing a strong foundation for future development [1]. In 1989, Ford provided PATH with four vehicles as an experimental platform for close-range automatic longitudinal control. PATH equipped these vehicles with throttle and brake actuators, forward-ranging radar, wireless local area network communication systems, control computers, and software to achieve close-range cooperative vehicle tracking [2]. Subsequently, PATH added V2V communication to the adaptive cruise control (ACC) system, creating a cooperative adaptive cruise control (CACC) system. The idea behind the CACC system was not only to enable the cruise control system of a vehicle to maintain an appropriate following distance behind other vehicles by slowing down when necessary but also to allow the vehicles to cooperate by communicating with each other while in ACC mode. As a result, the vehicles could follow each other more closely, accurately, and safely with braking and acceleration being cooperative and synchronized. PATH conducted experiments on the CACC system using four Nissan vehicles and the results showed significant improvements in the vehicle following stability compared to the same four vehicles using their production ACC controllers without cooperation [3]. Subsequently, from 2014 to 2017, PATH equipped CACC systems on four Infiniti M56 vehicles, using V2V communication to share real-time information about their motion. The results showed that the CACC system made all vehicles follow the same speed curve as the leader, with no significant amplification or delay, indicating that V2V communication is capable of providing the necessary preview information to achieve stable vehicle-following control, thereby forming a high-performance traffic flow [4]. Since 2015, PATH has been working with the Volvo Group to develop CACC systems for heavy trucks, as part of an exploratory advanced research project sponsored by the Federal Highway Administration and the California Department of Transportation (Caltrans). PATH’s research shows that CACC systems can improve the following performance of trucks, significantly reducing the following distance and making the vehicle-following dynamics more stable. The prototype systems are typically able to react automatically to cut-in vehicles, increasing gaps to accommodate them safely, while significantly reducing fuel consumption of heavy trucks [5].
Related projects have also been carried out in Europe. The first truck platooning project in Europe, CHAUFFEUR, was funded in 1996. It introduced the concept of electronically coupling heavy trucks [6,7]. Additionally, the Safe Road Trains for the Environment (SARTRE) project [8] supported by the European Commission aims to develop and test an environmental road platoon composed of mixed vehicle types, such as trucks and cars, that can operate on public roads without any changes to infrastructure and interact fully with other road users. The project aims to encourage a gradual shift towards the use of individual transport by developing environmentally friendly road platoons. The developed systems will help to adopt road trains safely on unmodified public roads and interact fully with non-platooned vehicles. The results of the SARTRE project can be summarized into three different categories of potential benefits: fuel consumption, commercial viability, and infrastructure and environment [9]. Firstly, for fuel consumption, the project demonstrates that vehicles can save 7%‒15% of fuel if there is a space of 8 meters between them. Secondly, in terms of commercial viability, the project shows that platooning is economically feasible for transporters. Finally, regarding the infrastructure and environment, the project demonstrated that platooning can reduce congestion and emissions. Similarly, the European Commission also completed the COMPANION (Cooperative dynamic formation of platoons for safe and energy-optimized goods transportation) project between 2013 and 2016 [10]. The objective of this project was to develop cooperative mobility technologies for supervising vehicular platooning to enhance fuel efficiency and safety in goods transportation. This project introduced a novel real-time coordination system that defines optimized vehicle flows, dynamically creating, maintaining, and dissolving fleets based on online decision mechanisms while considering historical and real-time information regarding infrastructure conditions. With this technology, fleets will no longer be composed solely of vehicles with common origins and destinations, but will instead be dynamically formed on the road by merging vehicles sharing only partial routes, referred to as sub-fleets. Therefore, the proposed concept represents an innovative enabling technology with the potential to fundamentally transform contemporary freight logistics and the overall transportation infrastructure. In 2018, the European Commission launched the ENSEMBLE (ENabling SafE Multi-Brand pLatooning for Europe) project, a more challenging truck formation program [11]. The project uses multi-brand trucks in formation to improve fuel economy, traffic safety, and throughput. This will be achieved by driving six trucks of different brands in a platoon (or platoons) under real traffic conditions across national borders. The program ended in 2022 with numerous research results demonstrating that multi-brand truck platooning is completely technically feasible [12].
The development of the MVCC system is always accompanied by the development of chip computing power, control algorithms, sensors, and communication technologies. As shown in Figure 1, the ACC system relies on sensor technology and control algorithms. With the development and application of V2V communication, the CACC system and platooning system were born. The development of road communication facilities also brings the possibility of vehicle-road cooperation. With the increase of environmental state information, powerful computing chips also become one of the key factors in advancing multi-vehicle cooperative and vehicle-road collaboration. In addition, the development of the MVCC system and vehicle-road collaboration system relies on powerful control algorithms designed for complex multi-agent systems with a mix of heterogeneous vehicles and complex environmental agents. MVCC system is a rapidly evolving field with significant potential to transform the way we move people and goods. With the vehicle platooning system, for example, only one driver can drive and manage a fleet of vehicles. Overall, the development of MVCC systems has achieved a very considerable and positive effect on modern urban transportation, such as improved traffic efficiency [13], increased road capacity [14], improved road safety [15], and reduced fossil fuel consumption [16]. In addition, with the development of intelligent transportation infrastructure, vehicle-road collaboration will further enhance the excellent performance of MVCC systems [17].

Figure 1. The development trajectory of multi-vehicle cooperative control (MVCC) system.
The remainder of this paper is organized as follows: Section 2 introduces the architecture of the MVCC system and strategies, as well as its information flow topologies (IFT). Section 3 focuses on the control aspect of MVCC systems, where different literature is reviewed by their category. Applications of the MVCC system are introduced with detailed examples in Section 4. Finally, section 5 concludes the paper with some further discussions.
2. Architectures and strategies of MVCC system
The commercially available MVCC systems vary according to their application scenarios, but all follow a basic system architecture, namely the CACC system architecture. On the basis of the CACC system, more diversified MVCC systems can be obtained by optimizing the IFT and control strategy [18].
2.1. System structure
Mainstream automotive original equipment manufacturers (OEMs) use the system architecture shown in Figure 2 for their ACC and CACC system designs. The research of UC Berkeley PATH has indicated that the current implementations of CACC systems in production vehicles are primarily developed as an extension of commercially available ACC systems. More research designs and experiments on the CACC system completed by Ploeg et al. have also adopted similar system architectures [3,19]. This CACC system architecture mainly consists of three parts: perception, planning, and actuation. During the perception phase, the connected and autonomous vehicle (CAV) acquires information from onboard sensors, such as LIDAR, odometer, and flag signals, and incorporates them into the data structure of the CAN bus. In addition, the CAV will also receive information from the wireless communication module. The information in the wireless communication module includes the following two parts: 1) data transmitted by other CAVs in the CACC system via V2V communication, such as speed, acceleration, inter-vehicle distance, current time interval, etc.; 2) data collected by GPS with differential correction of the wide-area augmentation system, including the vehicle position sequences in the multi-vehicle system. During the planning phase, the high-level controller will calculate the reference trajectory and parameters for the next control cycle, where researchers and engineers propose and implement the vehicle control algorithms. In practical engineering development, normally, for a car with a CACC system, the ACC system will also be provided, and the driver can switch between them accordingly. The reference motion commands generated in the planning phase will be executed by the actuators.
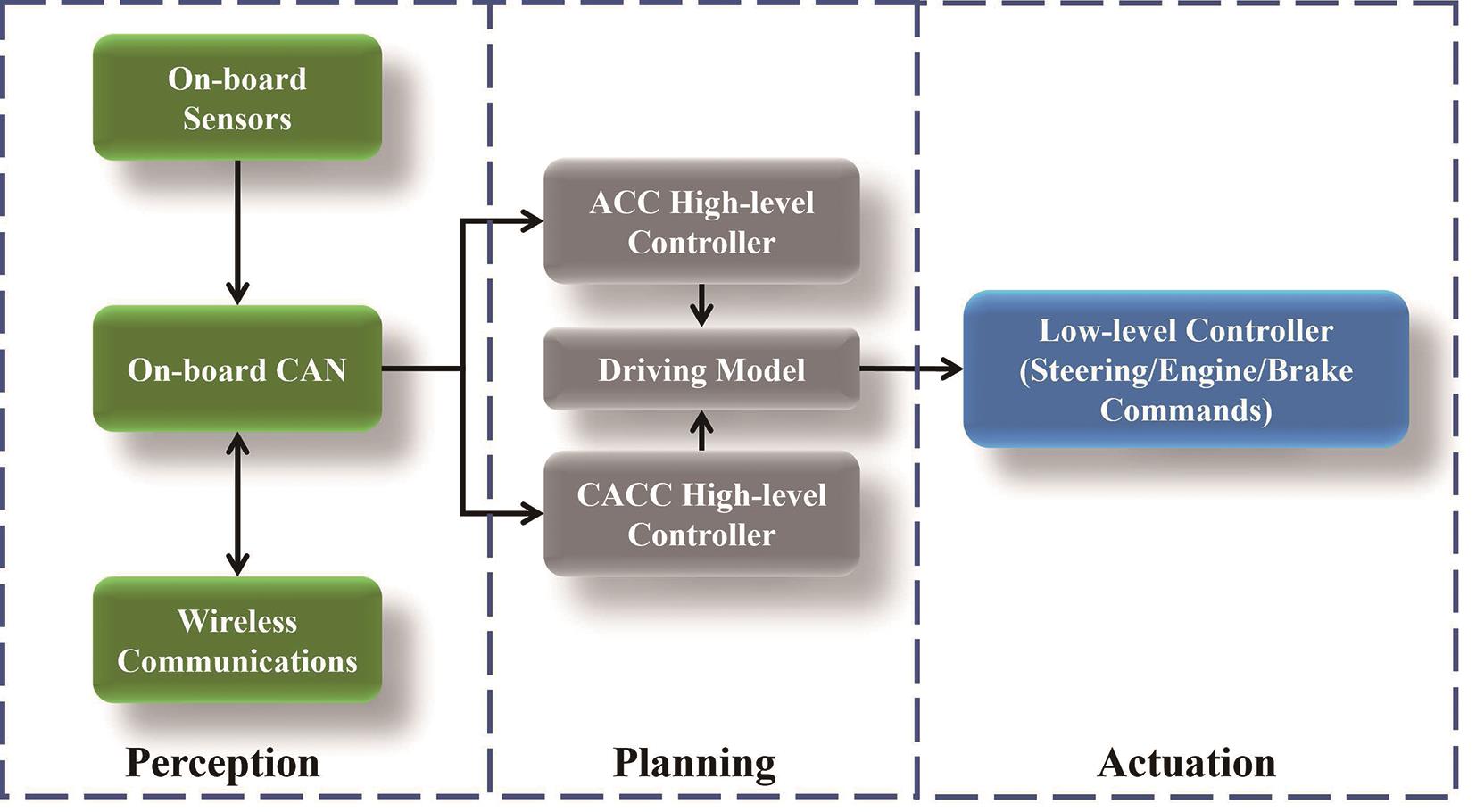
Figure 2. System architecture block diagram of cooperative adaptive cruise control (CACC).
In the context of the MVCC system, IFT refers to the network structure that describes the exchange of information between different vehicles. Figure 3 show typical examples for IFT ( predecessor following (PF) [20], bidirectional (BD) [21], predecessor leader following (PLF) [22], bidirectional-leader (BDL) [23], two-predecessor following (TPF) [22], two-predecessor-leader following (TPLF) [24]), where the vehicles are represented as nodes and communication links are represented as edges. By carefully selecting the connectivity and communication protocols between vehicles, the system can ensure that information is shared in a timely and efficient manner, enabling coordinated actions among the vehicles. In addition, a well-designed information flow topology can also enhance the robustness and fault-tolerance of the system, by enabling redundant communication paths and alternative routes for information exchange. In practical applications, PF and BD have been more widely used due to the more mature and reliable onboard sensors. However, with the development of wireless communication technology, PLF, BDL, TPF, and TPLF are also gradually studied and developed.
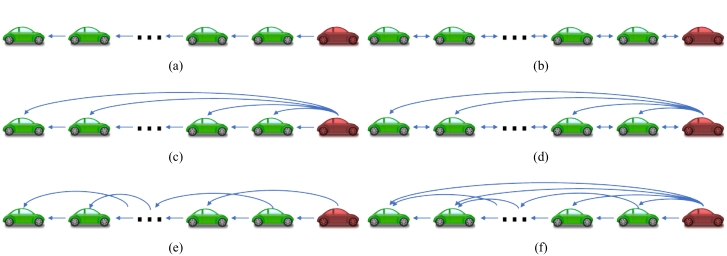
Figure 3. Common information flow topologies, where red cars represent the leader and green cars represent the following vehicles. (a) predecessor following [20]; (b) bidirectional [21]; (c) predecessor leader following [22]; (d) bidirectional-leader [23]; (e) two-predecessor following [22]; (f) two-predecessor-leader following [24].
2.2. System strategies
2.2.1. Adaptive cruise control
ACC system can adjust the speed and following distance of a vehicle based on the distance and speed of other vehicles on the road by automatically controlling the throttle and brakes. The system typically uses radar or lidar sensors, along with cameras and computer algorithms, to monitor the vehicle’s surroundings and respond accordingly. The concept of ACC is to maintain a safe distance from the vehicle ahead, while also reducing the workload of the driver in terms of accelerating and decelerating. Nowadays, the ACC system has gradually become a standard ADAS function of automobiles [25]. Typically, ACC systems operate in a limited velocity range of 40 to 160 km/h with a maximum braking deceleration of approximately 0.5  [26]. Without a preceding vehicle, a vehicle equipped with an ACC system travels at a user-set velocity, which is similar to the function of the traditional cruise control system. When a preceding vehicle is detected, the ACC system assesses whether the vehicle is still traveling safely at the user-set velocity. In the event that the preceding vehicle is either too close or traveling too slowly, the ACC system will automatically accelerate or decelerate the vehicle, switching from user-defined velocity control mode to user-defined safety distance control mode [27]. This is implemented by using a laser or radar to measure the relative distance between the host vehicle and the preceding [28]. This kind of safety distance is determined by the spacing strategies [29]. In the mainstream ACC system design, OEMs use two spacing strategies, namely the constant spacing strategy [30] and the variable spacing strategy [31]. Through the ACC system strategies of major vehicle OEMs, it is clear that the variable spacing strategy is preferred in more complex and changing traffic environments [32‒ 34]. The ACC system does play a substantial role in relieving driver fatigue and reducing traffic congestion in highway scenarios and has also been recognized by the market [35]. However, in complex road conditions at low speeds, the conventional ACC system is no longer applicable. This is because in complex road conditions and low-speed driving, more frequent acceleration and deceleration is required, and the conventional ACC system may not be able to respond to these changes quickly enough, resulting in an insufficiently safe distance from the preceding vehicle. The stop-and-go control system is an extension of the ACC system, designed to reduce driver workload in urban areas where the ACC system is virtually ineffective [36].
[26]. Without a preceding vehicle, a vehicle equipped with an ACC system travels at a user-set velocity, which is similar to the function of the traditional cruise control system. When a preceding vehicle is detected, the ACC system assesses whether the vehicle is still traveling safely at the user-set velocity. In the event that the preceding vehicle is either too close or traveling too slowly, the ACC system will automatically accelerate or decelerate the vehicle, switching from user-defined velocity control mode to user-defined safety distance control mode [27]. This is implemented by using a laser or radar to measure the relative distance between the host vehicle and the preceding [28]. This kind of safety distance is determined by the spacing strategies [29]. In the mainstream ACC system design, OEMs use two spacing strategies, namely the constant spacing strategy [30] and the variable spacing strategy [31]. Through the ACC system strategies of major vehicle OEMs, it is clear that the variable spacing strategy is preferred in more complex and changing traffic environments [32‒ 34]. The ACC system does play a substantial role in relieving driver fatigue and reducing traffic congestion in highway scenarios and has also been recognized by the market [35]. However, in complex road conditions at low speeds, the conventional ACC system is no longer applicable. This is because in complex road conditions and low-speed driving, more frequent acceleration and deceleration is required, and the conventional ACC system may not be able to respond to these changes quickly enough, resulting in an insufficiently safe distance from the preceding vehicle. The stop-and-go control system is an extension of the ACC system, designed to reduce driver workload in urban areas where the ACC system is virtually ineffective [36].
Moreover, the existing distance sensors alone are insufficient to enable the current ACC system to accurately detect sudden lane changes of vehicles in adjacent lanes, which makes the system unable to decelerate the vehicle, leading to tailgating [37]. On roads with large curves, the onboard distance sensor may lose the view of the vehicle in front of it, causing the ACC system to make a false determination that there is no vehicle ahead. This misjudgment can cause the vehicle to travel at the user-set velocity in the ACC system and increase the risk of a collision [38]. Additionally, the ACC system is susceptible to over-aggressive deceleration of the preceding vehicle, i.e., successive vehicles in ACC mode can substantially amplify the initial disturbance, even beyond the intelligent driver model (IDM) [39]. This amplification of the initial disturbance can create a significant crash risk for vehicle fleets equipped with the ACC system. The development of connected automobile technology offers the possibility to solve these challenges mentioned above [40]. Connected technology can obtain information not only about the lane-changing of adjacent vehicles but also about the status of vehicles beyond the field of view of the onboard sensors. Obtaining this enhanced information can substantially reduce the number of failure scenarios for the ACC system.
2.2.2. Cooperative adaptive cruise control
Remarkable advances in CAV have been achieved over the last two decades, with V2V communication, in particular, gaining widespread adoption [22]. Connectivity and automation are both integrated into CAVs, enabling them to not only drive by themselves through onboard sensing but also to communicate with each other through V2V communication [41]. The CACC system is one of the most prospective technologies for CAVs, which extends the ACC system with cooperative control of CAVs.
In general, a CACC system with a constant time spacing strategy can be described as follows,

where  represents the constant standstill distance between the two vehicles and also the minimum safe distance between two vehicles.
represents the constant standstill distance between the two vehicles and also the minimum safe distance between two vehicles.  denotes the velocity of the
denotes the velocity of the  vehicle.
vehicle.  and
and  represent, respectively, the position of the and preceding vehicle.
represent, respectively, the position of the and preceding vehicle.  is the desired time headway,
is the desired time headway,  is the spacing error. CACC system model (1) describes such a realistic application scenario: when the velocity of the preceding vehicle drops to zero in a very short time, the time required for the following vehicle to travel at the current speed to the minimum safe distance is . The following vehicle needs to decelerate effectively within the time to avoid a collision with the preceding vehicle. Obviously, the following distance should be increased when the velocity of the following vehicle is larger.
is the spacing error. CACC system model (1) describes such a realistic application scenario: when the velocity of the preceding vehicle drops to zero in a very short time, the time required for the following vehicle to travel at the current speed to the minimum safe distance is . The following vehicle needs to decelerate effectively within the time to avoid a collision with the preceding vehicle. Obviously, the following distance should be increased when the velocity of the following vehicle is larger.
In practical engineering applications, the CACC system usually has four patterns, namely, speed control mode, gap control mode, gap-closing control mode, and collision avoidance control mode [42]. Taking the CACC mode in Simulation of Urban Mobility (SUMO) as an example, the different modes are defined as follows [43].
- Speed control mode: The CACC system switches to speed control mode when the headway is greater than 2 s [44] or when no preceding vehicle is within detection or communication range of the vehicle, i.e. the vehicle travels at the driver’s desired driving speed.
- Gap control mode: When the distance between the front and rear is less than 0.2 m [44] or the speed difference is less than 0.1 m/s [44], this mode is activated to keep a fixed headway time distance with the front vehicle for driving.
- Gap-closing control mode: This mode is activated when the time distance between the front and rear ends is less than 1.5 s[44]. This mode ensures a smooth transition between the speed control and Gap control modes.
- Collision avoidance control mode: This mode is activated when the headway time distance is less than 1.5 s or the spacing deviation is negative. The main purpose of this mode is to avoid rear-end collisions between vehicles [43].
3. Control
The control objectives of an MVCC system mainly include appropriate inter-vehicle distance, consistent driving velocity, and safety avoidance between vehicles. In addition, the energy consumption [45] of the vehicle, and the string stability of the multi-vehicle system (MVS) can also be included.
3.1. PD/PID control
Proportional-derivative (PD) and proportional-integral-derivative (PID) are the main control methods in the existing commercial MVCC system. In general, the front and rear spacing errors will be the feedback signal of the controller. Most automotive OEMs use the PID control method to implement the CACC system because this methodology has many characteristics, such as simple algorithm principle, easy implementation, and simple parameters. Both Wang [46] and Gong [47] used an adaptive PD controller to design the CACC system under the TPF information flow topology. Each specific IFT may be urgently exchanged for other forms of IFTs in actual operation. Degradation of the IFT may cause disorganization of the MVCC system as well as increase the risk of collisions between members of the MVCC system. The adaptive PD controller is not highly dependent on the form of IFT, and it can be applied to most IFTs. The following behavior of the vehicle is continuously determined during the operation of the adaptive PD controller vehicle, based on the degradation of the IFT. Also, the confirmation of dynamic parameters ensures the string stability of the MVCC system. Particularly, in [47], a novel adaptive proportional-derivative (PD) controller is introduced in the context of a two-predecessor-following IFT, aimed at mitigating adverse consequences stemming from communication breakdowns. The PD controller’s parameters are meticulously optimized to guarantee platoon string stability. Moreover, the envisaged PD controller takes into account the individual vehicle performance, ensuring that, in the event of communication failure, the system transitions to a specific form of CACC system rather than reverting to basic ACC system. This transition significantly enhances overall platoon control performance. Gong et al. [48] developed a parameter self-tuning fuzzy PID algorithm to design an ACC strategy. The parameters of the PID controller are adjusted online by fuzzy rules according to the traffic conditions. The results show that the parameter self-tuning fuzzy PID controller combines the advantages of PID controller and fuzzy controller. The control algorithm improves the driving safety of the ACC system and exhibits higher system response speed and driving comfort. In an MVCC system (vehicle platoon system, for example), the working conditions of the vehicles can become complex, and the use of PID controllers with fixed parameters and few computations cannot cope with this challenge. A learning control method combining a deep deterministic policy gradient and a PID controller was proposed by Yang et al.[49]. In line with the idea of fuzzy control, the method is also desired to adjust the parameters of the PID online. The presented approach builds upon the foundation of a PID controller, with the ability to dynamically fine-tune its parameters in response to the vehicular platoon’s current state through the utilization of the Deep Deterministic Policy Gradient (DDPG) algorithm. The DDPG-PID controller effectively addresses the limitations of conventional controllers, which often suffer from inadequate adaptability, all without necessitating manual parameter tuning. The results show that by using the proposed method, the time for the vehicle platooning system to enter the steady state is reduced. The performance of the maximum distance error is also effectively improved. Numerous studies have shown that PD and PID controllers are still widely used in MVCC systems. But single PD, PID controllers are no longer adapted to complex MVCC systems. In this case, combining adaptive control, fuzzy control, machine learning and reinforcement learning with PD or PID controllers is a feasible solution.
3.2. Consensus control
The communication range of CAVs is limited and it is impossible to communicate with vehicles outside the communication range, so the distributed control framework is clearly the proper solution for the MVCC system. Consensus control, a widely used approach for distributed control, has proven to be effective and efficient for MVCC systems. Instead of a centralized scheme that assumes the availability of global team knowledge to all network agents, a consensus-based approach operates through local interactions and evolves in parallel [50]. Additionally, the consensus control allows for more reliable coordination between vehicles, resulting in smoother and smoother flow, thereby contributing to more efficient travel for all participants [51]. The most basic consensus control algorithm can be expressed as:

where  is the (
is the (  ,
,  ) entry of the adjacency matrix of the associated communication graph of the system at time
) entry of the adjacency matrix of the associated communication graph of the system at time  , is the position information of the vehicle. This consensus algorithm will make the state of the agent converge to the state of the neighborhood. In an MVS, we construct vehicles into a multi-agent network, with each vehicle corresponding to one agent. The state of each vehicle and the state of the front and rear vehicles always tend to reach the same agreement, which is the control objective of the MVCC system. Therefore, it is feasible to realize the MVCC system by the consensus control algorithm.
, is the position information of the vehicle. This consensus algorithm will make the state of the agent converge to the state of the neighborhood. In an MVS, we construct vehicles into a multi-agent network, with each vehicle corresponding to one agent. The state of each vehicle and the state of the front and rear vehicles always tend to reach the same agreement, which is the control objective of the MVCC system. Therefore, it is feasible to realize the MVCC system by the consensus control algorithm.
The basic consensus control described by (2) is a typical linear control algorithm, communication latency, nonlinearity, and heterogeneous MVSs all pose challenges to the feasibility of consensus control algorithms. Essentially, the control objective of the MVCC system can be considered as achieving state consensus in a network of dynamic systems affected by time-varying heterogeneous delays due to inter-vehicle wireless communication [52]. Typically, consensus control is used as a high-level control method to model the vehicle as a linear dynamics model. Consensus control focuses more on the interaction between vehicles and the dynamic changes of the vehicle information flow topology. In [53], the vehicle is modeled as a linear, second-order mass point dynamics model. A four-layer linear control framework in a connected vehicle environment is proposed to simultaneously achieve vehicle consensus in both the longitudinal and lateral directions. However, in practice, vehicle dynamics models are non-linear and complex and a single linear consensus controller can no longer meet realistic needs. Hu et al.[54] design a CACC system algorithm for a heterogeneous MVS by combining adaptive control and consensus control. To address the limitations of the linear consensus control algorithm, they use a feedback linearization tool to simplify the nonlinear vehicle model so that the consensus algorithm is feasible. Li et al. [55] design a CACC system algorithm for connecting platoons of CAVs based on distributed nonlinear consensus with delay dependence. Specifically, a nonlinear function was designed to describe the inter-vehicle following interactions among CAVs, taking into account the fact that the behavior of following vehicles depends on the distance to the preceding vehicle. The algorithm incorporates both the inter-vehicle following interactions and heterogeneous time delays. The convergence conditions of the proposed algorithm, which depend on the time delay, were analyzed using the Lyapunov-Krasovskii methods, and the constraints on delay were estimated. The proposed algorithm ensures both the consensus of CAVs and the consistency of vehicle behavior with traffic flow theory. More consensus controllers have been designed for the cooperative control of nonlinear MVSs [56‒ 58].
In [59], Wang et al. proposed a novel CACC system based on a distributed consensus algorithm that takes into account time-varying communication delays, as well as the length of different vehicles, the location of GPS antennas, and braking capabilities. In addition, they developed a distributed consensus protocol that enables the CACC system to achieve formation platooning, merging, and splitting. Li et al. [60] presents a control strategy for interconnecting platoons CAVs based on nonlinear consensus under different communication topologies. Specifically, the protocol uses pinning control to incorporate interaction between vehicles under both fixed and switching communication topologies. The proposed protocol’s finite-time stability and consensus are analyzed rigorously using LaSalle’s invariance principle and Lyapunov techniques. The theoretical analysis investigates how the communication topology affects the convergence and stability of the CAV platoon. The simulation results demonstrate the protocol’s effectiveness in achieving stable convergence with respect to position and velocity profiles, reducing the convergence time. In order to resist the negative effects of both dynamic topology and time-varying communication delays, Yu [61] and their team conducted research on a distributed consensus protocol for a CAV platoon with heterogeneous time-varying delays and switching topologies. To describe the longitudinal dynamic characteristics of the vehicles in the platoon, they proposed a third-order dynamic model that included a powertrain system inertia lag. In order to stabilize the heterogeneous vehicle platoon under external disturbances, they designed a novel distributed adaptive consensus protocol that took into account the time-varying delays and randomly switching communication topologies among the vehicles. Additionally, a method that depends on the delay range was adopted to handle the system’s heterogeneous time-varying delays, which were characteristic of the platoon. Overall, the instability of communication remains a major challenge to be addressed for multi-vehicle consensus control. This instability includes transient loss of communication, time-varying delays, packet loss of transmission data, and network attacks. A lot of research is still needed to solve this challenge from the perspective of control methods, state estimation, and cybersecurity.
3.3. Optimization-based control
Optimization-based control is an effective method to implement MVCC systems. In general, the design of optimization-based control can be equivalently formulated as a structured convex optimization problem with the objective of minimizing energy consumption or travel time. This allows the MVCC system implemented by optimal control to gain advantages in terms of energy consumption, the convergence time of the system, and other parameters. Also, optimization-based control methods usually consider nonlinearities and constraints, such as vehicle dynamics and vehicle aerodynamics. These advantages are not available for most consensus control methods.
Optimal control is a typical one of optimization-based control. Based on the properties of optimal control, it is easy to transform solving the control input of an MVCC system into solving an optimization problem that results in the lowest energy consumption of the MVCC system. Minimizing the overall fuel consumption  , driving along the road, from a time 0 to time
, driving along the road, from a time 0 to time  , would require an operating strategy minimizing
, would require an operating strategy minimizing
![]()
where  is the current fuel consumption depending on the vehicle’s time-varying velocity and acceleration
is the current fuel consumption depending on the vehicle’s time-varying velocity and acceleration  . The CACC system designed and developed according to this idea is called the Eco-CACC system. In [62], the authors construct energy consumption as a nonlinear function of acceleration and velocity. The optimal vehicle acceleration and velocity are obtained by solving a convex optimization problem so that the energy consumption of the CACC system can be minimized. Also from the perspective of environmental protection, Wang et al. [59] propose a platoon-wide Eco-CACC system that aims to minimize the overall energy consumption and pollutant emissions of the platoon during CACC system operation. Using optimal control for CACC system development, the final objective function to be optimized is similar, despite the different modeling approaches. Among the existing applications for optimal control in the CACC system, achieving energy consumption minimization is the dominant control objective. More similar studies can be found in the literature [63‒ 65].
. The CACC system designed and developed according to this idea is called the Eco-CACC system. In [62], the authors construct energy consumption as a nonlinear function of acceleration and velocity. The optimal vehicle acceleration and velocity are obtained by solving a convex optimization problem so that the energy consumption of the CACC system can be minimized. Also from the perspective of environmental protection, Wang et al. [59] propose a platoon-wide Eco-CACC system that aims to minimize the overall energy consumption and pollutant emissions of the platoon during CACC system operation. Using optimal control for CACC system development, the final objective function to be optimized is similar, despite the different modeling approaches. Among the existing applications for optimal control in the CACC system, achieving energy consumption minimization is the dominant control objective. More similar studies can be found in the literature [63‒ 65].
In existing research, MPC is more widely used than optimal control. Essentially, MPC is a truncated version of optimal control. Unlike optimal control, MPC does not emphasize the optimality of the entire control process (time domain) but retreats to consider only a finite number of future control cycles. Thomas et al. [45] develop a linear MPC method for the CACC system that directly minimizes fuel consumption rather than vehicle acceleration. In research [66], the authors use the MPC method to design a CACC system for the Volvo S60. Safety and string stability were enhanced by imposing additional constraints on the optimization problem. In the design of the controller, the acceleration of the front vehicle is used as a measured disturbance, which leads to faster responses and shorter inter-vehicle distances. Bu et al. [67] developed a new CACC system based on the factory ACC system of the Infiniti FX-45 vehicle by adding a wireless MPC communication system and an indirect adaptive MPC-based spacing adjustment controller. Unlike the previous controller design, in the MPC design here, the optimization problem was solved to minimize the time gap error and smoother control inputs. Compared to the stock ACC system, the upgraded CACC system reduces the following distance while ensuring no collisions. In addition, the comfort of the vehicle has been improved.
Actually, traditional MPC implemented in a centralized manner assumes that all states are known. However, obtaining the state information of all vehicles and computing large-scale optimization problems are not easy, which makes centralized MPC not suitable for MVSs with large-scale quantities. Therefore, distributed MPC (DMPC) schemes have been proposed to solve this problem. Tapli et al. [68] designed a vehicle CACC system under bidirectional communication using DMPC. In this distributed controller design, the authors model the input and output errors as penalty functions and also introduce the idea of consensus control to keep the state of the vehicle close to the state of neighboring vehicles. Similarly, Nie et al. [69] proposes a DMPC algorithm to solve the cruise control problem for a heterogeneous MVS. The vehicles in the MVS are dynamically decoupled with different dynamic parameters, which means that this DMPC controller can cope with unintended switching of the IFT. The cost function of the locally optimal control algorithm for each vehicle is designed with traceability as the control objective, and its asymptotic stability is ensured by using a terminal constraint approach.
In general, optimization-based control methods are more capable of diversifying control objectives than consensus control and PD/PID control. Different control objectives can be achieved by designing different objective functions and constraints. Nowadays, the design of MVCC systems is not only limited to the following distance and vehicle state consistency, but more and more OEMs are focusing on the environmental protection of the vehicle, passenger comfort, etc., which makes the optimization-based control methods more and more popular in the design of existing MVCC systems.
3.4. Reinforcement learning
Reinforcement learning (RL) has been applied to MVCC systems such as the CACC system and platooning system. As a data-driven control-based approach, RL does not rely highly on an accurate dynamics model. Therefore, RL is advantageous in dealing with cooperative control tasks of heterogeneous multi-vehicle systems. For a heterogeneous CACC system, Farag et al. [70] used the Deep Deterministic Policy Gradient (DDPG) algorithm and MPC control method for vehicle platooning, respectively. By comparing the performance of the two methods it was concluded that the DDPG-based RL controller outperformed MPC in terms of computation time and control effort, especially in more realistic and complex situations, while maintaining similar root mean square error of distance between vehicles. However, DDPG has the problem of low efficiency in exploring continuous action space, and single or homogenized vehicle data will reduce the robustness of the model. Although GGPG has an excellent performance in the MVCC system, there are still many challenges. Therefore, Lu et al. [71] propose a queuing shared deep deterministic policy gradient algorithm (PSDDPG) for multi-vehicle networks to improve the exploration efficiency of this controller in continuous action space. In addition, additional queuing noise is added to the noise-based DDPG algorithm to improve the diversity of training samples during the exploration process, thereby achieving the goal of improving model robustness. In [72], a deep RL-based CACC system has been developed that allows platooning vehicles to learn a robust communication protocol alongside their coordination policies. Long short-term memory (LSTM) model is used to implement the ACC system for each vehicle and trained using policy gradients. To coordinate driving, the LSTM of each vehicle adaptively exchanges relevant information with other vehicles to form the CACC system. This reduces the control difficulty caused by dynamic information flow topology in the CACC system. Shi et al. [73] propose a cooperative strategy of CAVs longitudinal control for a mixed connected and automated traffic environment based on a deep RL algorithm, which enhances the string stability of mixed traffic, car following efficiency, and energy efficiency. The difference between the results of these two studies is that the approach proposed by Shi et al. is to obtain an effective control policy through RL, while the method in [72] is more concerned with obtaining an optimized communication protocol. Unfortunately, these MVCC systems using RL methods are still in the theoretical research stage. There are still many challenges in real-vehicle validation as well as commercialization.
3.5. String stability
The tight formation control of platoons has a particular challenge known as “string instability”, i.e., disturbances of system states are amplified along the string of vehicles. The string instability of tight formation platoons can cause convoy congestion and increase the risk of collision, which seriously compromises the benefits of platoon control. To overcome this problem, string stability theory was proposed. String stability theory is a mathematical framework used to study the stability of traffic flow in a queue, where vehicles are arranged in a linear fashion and are subject to delays and perturbations. This theory is of great importance in the design and analysis of traffic control systems, as it provides a systematic way to understand and predict the behavior of queues.
Intuitively, a vehicle platoon is considered to be string stable if the disturbances are not amplified when propagating backward along the vehicle platoon. In the mainstream, several mathematical descriptions are applied to define string stability.
3.5.1. Frequency domain string stability
For a vector  , its
, its  -norm is given as
-norm is given as
![]()
Define the Laplace transforms of signals  , , and as
, , and as  ,
,  ,
,  , and
, and  . The , , and , respectively, represent the input, output, and error signal. Considering a distributed controller design for heterogeneous traffic, i.e., vehicles with possibly different characteristics and dynamics, conservative string-stability transfer functions
. The , , and , respectively, represent the input, output, and error signal. Considering a distributed controller design for heterogeneous traffic, i.e., vehicles with possibly different characteristics and dynamics, conservative string-stability transfer functions  are defined as follows [74, 75]:
are defined as follows [74, 75]:

Then, a conservative sufficient condition for string stability is obtained, i.e.,
![]()
Targeting a broader communication topology, we define string-stability transfer functions  between vehicle and vehicle
between vehicle and vehicle  . We can also obtain a necessary condition for string stability:
. We can also obtain a necessary condition for string stability:
![]()
where denotes the last vehicle in the vehicle platoon. This condition strictly limits the amplification of oscillations upstream among the platoon. This kind of stability is defined as strong frequency-domain string stability (SFSS) [75]. It can be intuitively seen that SFSS emphasizes that the disturbance between any two neighboring vehicles is not amplified. A weaker version of SFSS is frequency-domain string stability (FSS), which only emphasizes that the perturbations between the vehicle and the leader are not amplified. Similarly, in the frequency domain, eventual string stability (ESS) [76], and head-to-tail stability (HTS) [77]. Essentially, ESS is a special case of FSS. Especially, the HTS was originally designed for mixed traffic, where the human-operated vehicle was regarded as the front vehicle. However, it is important to note that these frequency domain methods share the fundamental assumption that the platoon system is identified as linear.
3.5.2. Time domain string stability
To generalize the concept of string stability to a class of interconnected vehicle platoon systems as
![]()
where  , and there is no assumption of linearity in this system. The time-domain string stability is defined as follows:
, and there is no assumption of linearity in this system. The time-domain string stability is defined as follows:
![]()
For any given  , there exists a
, there exists a  making (9) true. Especially, if the
making (9) true. Especially, if the  asymptotically, the equilibrium point of the system is asymptotically time-domain string stability (ATSS). Of course, the other string stability that corresponds to this is time-domain string stability (TSS) [78]. In addition, there are more definitions of string stability being widely utilized, such as Lyapunov string stability (LSS), Input-to-output string stability (IOSS), and Input-to-state string stability (ISSS) [79].
asymptotically, the equilibrium point of the system is asymptotically time-domain string stability (ATSS). Of course, the other string stability that corresponds to this is time-domain string stability (TSS) [78]. In addition, there are more definitions of string stability being widely utilized, such as Lyapunov string stability (LSS), Input-to-output string stability (IOSS), and Input-to-state string stability (ISSS) [79].
3.6. Impact of wireless communication
MVCC system is highly dependent on wireless communication between vehicles. V2V communication provides enhanced information that enables vehicles to follow the vehicle in front with greater accuracy, faster response time, and shorter gaps. As a result, the stability of traffic flow and the safety of the vehicle are both improved [80]. It is due to the high dependence of the MVCC systems on V2V communication that the quality and stability of V2V communication will have an immediate impact on the performance of the MVCC system. Specifically, the communication delay will increase the risk of collision between vehicle fleets equipped with the CACC system, and secondly, in the case of communication loss, the CACC system will degrade to the ACC system, thus causing the fleet stability to decrease and the risk of collision to increase. Xing et al. [81] propose the use of a Smith predictor to compensate for the communication delay in homogeneous CACC systems in order to take more advantage of the CACC system from a road throughput perspective. In Zhang’s study, a novel CACC system controller based on optimal control in the space domain is proposed, where all variables are a function of longitudinal position rather than time. By developing the CACC system in the space domain instead of the time domain, its robustness to communication delay is greatly improved, thus reducing the minimum safety interval buffer and leading to better manoeuvrability [82]. More approaches for optimizing the CACC system in communication delay scenarios can be found in [83‒ 85]. Compared to communication delays, communication loss poses a more serious hazard to vehicle fleets equipped with the CACC system [86]. Acciani et al. [87] model communication losses as independent stochastic events and design a cooperative controller to mitigate their effects. This distributed collaborative controller is to minimize the variance of the trajectory when this stochastic event occurs. Considered from another perspective, when communication loss occurs, the CACC system controller is missing feedback input. State estimation methods can obtain a suitable state estimate value in place of the feedback input. Wu et al. [88] use an adaptive Kalman filter for state estimation, which greatly eliminates the negative effects of transient loss of communication. In addition, there are more research results on CACC system degradation due to unreliable V2V communication in [89‒ 91].
4. Applications of Multi-vehicle Cooperative Control
As shown in Figure 4, MVCC has a wealth of application scenarios. One of the most promising applications of MVCC is vehicle platooning [92, 93]. Platooning involves a group of vehicles that travel close together, connected through wireless communication and controlled by a lead vehicle. The lead vehicle is responsible for controlling the speed and direction of the platoon, and the other vehicles follow closely behind. This technology has the potential to reduce fuel consumption and emissions, increase safety, and improve traffic flow. Another important application of MVCC is cooperative lane changing [94]. In this application, vehicles in adjacent lanes communicate with each other to coordinate their lane-changing manoeuvres. This can improve safety and reduce congestion, as vehicles can move more smoothly and efficiently through traffic. Cooperative merging [95, 96] is a related application that involves coordinating the movement of vehicles entering or exiting a highway or other roadway. By coordinating the merging and diverging manoeuvres of multiple vehicles, this technology can reduce congestion and improve safety. MVCC can also be used to improve parking efficiency [97]. In cooperative parking, vehicles communicate with each other to find available parking spaces and coordinate their movements to enter and exit the parking lot or garage. This can reduce the time and energy required to find a parking space, as well as improve traffic flow in and around parking areas. Finally, MVCC can be used to enhance safety and efficiency at intersections [98]. By coordinating the movements of multiple vehicles, this technology can reduce the likelihood of collisions and improve traffic flow through busy intersections. In the following sections, studies about application scenarios for the MVCC are reviewed.

Figure 4. Potential application scenarios for multi-vehicle collaboration. (a) cooperative adaptive cruise of vehicles (adopted from: www.autotrader.co.uk), (b) cooperative lane changing or merging of vehicles (adopted from: www.roadsafetyuae.com), (c) merging of vehicles on ramps (adopted from: www.myrecordjournal.com), (d) cooperative driving at complex intersections (adopted from: https://xsj.699pic.com).
4.1. Multi-vehicle platooning technology
Platooning is a special application scenario of MVCC. When multiple vehicles are connected through the CACC system to form a stable MVS, all vehicles except the lead vehicle are in automatic follow mode, which is platooning. In the past decade, autonomous driving technology has received great attention, and companies such as Waymo and Tesla have made outstanding achievements in the field of autonomous driving. However, from the perspective of the capital market and the development of the autonomous driving industry in recent years, the commercialization of L4 and above autonomous driving technology has not been satisfactory, and the industry has frequently experienced bankruptcies, layoffs, and decreased valuations. For example, self-driving startup Argo AI officially announced its collapse, and the valuation of Intel-owned company Mobileye plummeted. Car manufacturers and autonomous driving technology companies are investing more effort in achieving mass production of L2 and L3 autonomous driving technology. With the commercialization of L4 autonomous driving technology still a distant prospect, it is expected that platooning technology will become a backup option.
In certain scenarios, such as large factories, mines, ports, logistics parks, and long-distance transportation, a multi-vehicle management system based on a platooning model seems to be a more promising solution for substituting autonomous driving. As shown in Figure 5, in this mode, a fleet of several vehicles is led by a human driver in the first vehicle, while the following vehicles automatically follow. The following vehicles will drive in the same way as the preceding vehicle, including accelerating, changing direction, braking, and maintaining a certain formation. This configuration makes it possible for a single driver to manage multiple vehicles, saving on labor costs. In the event of special circumstances or technical malfunctions, the driver of the leading vehicle can still address the issues of the following vehicles, making the entire platoon of vehicles controllable. Platooning is not truly autonomous driving technology but rather uses automated control to expand the driver’s management range and handle unforeseeable situations that autonomous driving technology may encounter. This is undoubtedly a compromise, and it is also a relatively easy route to implement autonomous driving technology today.

Figure 5. A commercially promising truck platooning transportation solution.
The application of vehicle platooning, especially truck platooning, has been studied for a long time. California PATH Program [92], KONVOI project of RWTH Aachen University [99], Energy ITS project of Japan [100] delve into the impact of truck platooning technology in terms of energy savings and highway capacity, and CO  emissions. In general, the technical solutions for implementing platooning are still largely convergent. The main functions implemented include lateral sensing and control, and longitudinal sensing and control. The lateral sensing relies on LIDAR, millimeter wave radar, ultrasonic radar, and vision sensors. The lateral control algorithm is based on the lateral deviation from the lane markers as a reference and the yaw angle relative to the lane markers [101]. Longitudinal sensing relies on V2V communication in addition to distance and vision sensors. The control inputs for longitudinal control are expressed as speed and clearance differences between the vehicle in front and the vehicle behind [102]. The CACC system is one of the most typical longitudinal control systems in vehicle platooning and is also the most widely used MVCC system. Some mainstream heavy truck manufacturers and research institutes have already implemented vehicle platooning to try in trucking. Daimler Trucks implemented a truck platoon with 3 identical Mercedes-Benz Actros trucks. Daimler Trucks successfully participated in the European Truck Platooning Challenge in April 2016 in Rotterdam and demonstrated to the community that truck platoons can be ready for public roads [103]. Nowakowski et al. [104] implemented PATH’s third-generation CACC system for heavy trucks by adding dedicated short-range communications to the existing ACC system of Volvo heavy trucks. The upgraded system provides enhanced string stability, faster responses, and shorter gap settings than the production ACC system. Researchers for the Partial Automation for Truck Platooning (PATP) project and the Driver-Assistive Truck Platooning (DATP) project from the Federal Highway Administration, United States [105] developed CACC systems for commercial trucks that used DSRC for V2V communication, which allowed the trucks to safely maintain a constant time gap in the PATP project and a constant following distance in the DATP project. When engaged, a following truck’s acceleration and braking were controlled by the CACC system. In addition, more platooning technology companies such as Peloton, Locomotion, Scania, etc. are gradually trying to commercialize this technology.
emissions. In general, the technical solutions for implementing platooning are still largely convergent. The main functions implemented include lateral sensing and control, and longitudinal sensing and control. The lateral sensing relies on LIDAR, millimeter wave radar, ultrasonic radar, and vision sensors. The lateral control algorithm is based on the lateral deviation from the lane markers as a reference and the yaw angle relative to the lane markers [101]. Longitudinal sensing relies on V2V communication in addition to distance and vision sensors. The control inputs for longitudinal control are expressed as speed and clearance differences between the vehicle in front and the vehicle behind [102]. The CACC system is one of the most typical longitudinal control systems in vehicle platooning and is also the most widely used MVCC system. Some mainstream heavy truck manufacturers and research institutes have already implemented vehicle platooning to try in trucking. Daimler Trucks implemented a truck platoon with 3 identical Mercedes-Benz Actros trucks. Daimler Trucks successfully participated in the European Truck Platooning Challenge in April 2016 in Rotterdam and demonstrated to the community that truck platoons can be ready for public roads [103]. Nowakowski et al. [104] implemented PATH’s third-generation CACC system for heavy trucks by adding dedicated short-range communications to the existing ACC system of Volvo heavy trucks. The upgraded system provides enhanced string stability, faster responses, and shorter gap settings than the production ACC system. Researchers for the Partial Automation for Truck Platooning (PATP) project and the Driver-Assistive Truck Platooning (DATP) project from the Federal Highway Administration, United States [105] developed CACC systems for commercial trucks that used DSRC for V2V communication, which allowed the trucks to safely maintain a constant time gap in the PATP project and a constant following distance in the DATP project. When engaged, a following truck’s acceleration and braking were controlled by the CACC system. In addition, more platooning technology companies such as Peloton, Locomotion, Scania, etc. are gradually trying to commercialize this technology.
Although the development and commercialization of platooning are relatively optimistic, there are still challenges to fully commercializing the technology on a large scale. One of the major challenges is to solve the dynamic decoupling and coupling problem in large-scale platooning fleets, which is critical for ensuring the safety and stability of the fleet under the intervention of external road users. In addition, cyber-attacks, loss of communication, etc. pose significant threats to platooning vehicle fleets, emphasizing the need to refine and enhance cyber security in vehicle platooning.
4.2. Multi-vehicle cooperative lane-changing
Crash data from 2010 to 2017 [106] shows that the sudden lane-changing caused about 17.0% of total severe crashes, followed by speeding (12.8%) and tailgating (11.2%). This crash data also indicates that the severity of lane-changing-related crashes is relatively high compared to other crash causes [106]. MVCC offers the potential to reduce lane-changing collisions. The development of information interconnection technology has made it easy for vehicles to share lane-changing information within a localized range. This distributed information sharing provides the possibility for multi-vehicle cooperative lane changing. Vehicles are able to plan their own lane-changing timing and change trajectory based on the lane-changing signals, position, speed, and acceleration signals of neighboring vehicles in the local range.
4.2.1. Stratery cooperative lane-changing
Wang et al. [94] proposed a cooperative lane-changing strategy based on MPC to mitigate the adverse impact of lane-changing on traffic flow. The proposed strategy achieved active cooperation among the vehicles performing lane-changing on the target lane and the leading and following vehicles on the target lane during the lane-changing process. In this MPC controller, safety, comfort, and traffic efficiency were modeled as optimization objectives. Numerical simulation results of the cooperative lane-changing strategy demonstrated a reduction in the deceleration of following vehicles compared to traditional lane-changing, and the propagation of shockwaves in traffic flow can be alleviated to some extent. The research team from Chang’an University [107] has proposed a centralized, two-stage optimization-based cooperative lane-changing method for CAVs on two-lane highways. The proposed method aims to minimize negative impacts on the traffic flow of both lanes by facilitating effective coordination between the changing vehicles and subsequent vehicles on both the target and original lanes. By solving a constrained optimization demonstrated a reduction in the deceleration of following vehicles compared to traditional lane-changing, the ideal longitudinal control acceleration for each cooperative vehicle is generated. The results demonstrate that the proposed method can achieve safe and smooth cooperative lane-changing in a given driving scenario and reduce lane-changing vibrations on both the original and target lanes. Ni et al. [108] propose a novel multi-vehicle cooperative lane-changing strategy for an interconnected vehicle environment. Unlike other lane-changing strategies, this approach determines the feasibility of cooperative lane-changing operations by establishing a gain function based on an incentive model. Specifically, the feasibility of cooperation is determined by comparing the gains from lane-changing and lane-keeping under current conditions. Once the lane-changing decision is obtained, a multi-objective optimal control function for cooperative lane-changing is established based on MPC to achieve distributed control. For the execution of lane-changing, the authors propose a novel two-stage cooperative lane-changing framework that divides the lane-changing process into a lane-changing stage and a longitudinal lane-adjustment stage. This two-stage lane-changing framework is important for solving complex numerical problems caused by collision constraints and the nonlinear dynamics of vehicles. However, most of the above-mentioned multi-vehicle cooperative lane-changing methods are passive and opportunistic, as they are only implemented when the environment allows for them. The new approach proposed by Kim et al. [109] relies on the role of facilitators assigned to CAVs. The facilitators interact with and modify the environment to enable other CAVs to change lanes. A distributed MPC path planner and a distributed coordination algorithm are used to control the facilitators and other CAVs in a proactive and cooperative manner.
4.2.2. Trajectory generation for cooperative lane-changing
In a multi-vehicle dynamic environment, it is extremely important to generate safe, comfortable lane-changing trajectories for vehicles that have already obtained lane-changing decisions. Li et al. [110] conducted research on collaborative lane-changing trajectory planning for vehicles in mandatory lane-changing scenarios. They propose an innovative model that considers traffic scenarios with multiple mandatory lane-changing requirements and accomplishes vehicle trajectory planning by considering safety and efficiency. The limitation of the model is that it does not take into account the free lane-changing scenario. Using similar ideas, Luo et al. [111] transform cooperative lane-changing into an optimization solution problem, considering both same-direction and intersectant-direction lane-changing scenarios, ultimately maximizing safety, comfort, and lane-changing efficiency. Among the many studies on collaborative lane-changing, multi-objective optimization has received great attention and is widely used in the generation of lane-changing trajectories [108, 112].
4.2.3. Decision-making for cooperative lane-changing
In multi-vehicle cooperative lane-changing scenarios, decision-making of lane-changing is more challenging than trajectory generation. In existing research, most decision-making of multi-vehicle cooperative lane-changing is based on specific rules. These rule-based strategies typically involve the establishment of a rule system. However, when traffic scenarios become more complex, the limitations of this system become evident, as new rules must be continuously added to the system. The addition of a large number of rules reduces the system’s interpretability. In recent years, the development of computer computational capabilities and the increase in data has provided a foundation for the application of machine learning in multi-vehicle cooperative lane-changing decision-making. Machine learning provides new opportunities for autonomous driving by allowing strategies to be learned through data and experience. In particular, RL [107] makes it feasible for vehicles to learn strategies through interaction with the environment. RL can address large-scale systems with potentially infinite states and action spaces in a model-free manner. However, such cooperative lane-changing strategies based on RL are currently only in the simulation stage, and their reliability and safety in actual traffic scenarios have not been widely verified.
4.3. Multi-vehicle cooperative merging
With the increasing number of vehicles on the road, managing traffic congestion during peak hours has become a major challenge for urban transportation systems. In this context, multi-vehicle cooperative merging has emerged as an important task for traffic management. In the process of merging, the original vehicle platoon is susceptible to unstable cascading effects due to external interferences. For example, when a vehicle or queue merges with another, a new interconnected MVS is formed, and this merging behavior must ensure the stability of the new system; otherwise, traffic flow disruptions may occur. The MVCC system offers the possibility to achieve safe and effective cooperative merging.
4.3.1. Cooperative on-ramp merging
Cooperative on-ramp merging is a very common scenario. How to choose the merging timing and speed, and how to ensure the stability of traffic flow after merging have been investigated in [18,95]. A typical technological approach consists of a two-tiered merging control framework, which is comprised of centralized sorting and distributed control. Roadside proxies installed in the merging area determine the merging order of approaching vehicles based on estimated arrival times at the merging point. Once the order is determined, the distributed controller guides the vehicles through the merging process. To achieve stable queueing of the resulting new traffic flow, optimization of the distributed control protocol is required [113]. A similar strategy appears in [18], the key difference in the algorithms for determining merging sequences lies in the increased level of coordination between the mainline platoon and the merging ramp vehicles. The mainline platoon actively creates large gaps to facilitate the smooth merging of ramp vehicles. However, a limitation of these studies is that they only consider a specific case where the merging agent is a single vehicle rather than a platoon of vehicles. Another limitation is that these studies only consider the scenario where all vehicles are connected and automated. Chen et al. [114] conducted new explorations to address these limitations. They established a multi-vehicle cooperative merging control model for the merging area of a highway with dedicated lanes for CAVs and human-driven vehicles in a mixed-traffic environment. This was done to improve the overall efficiency of the merging area on the highway in a mixed-traffic environment.
4.3.2. Cooperative main lane merging
In addition to ramp merging, another common scenario is vehicles traveling on a main road making a merging. Wang et al. [115] use an MPC approach with a look-ahead design to design the lateral controller for performing the merging maneuver, which successfully implements the merging of a platoon with the platoon. On the basis of MPC, Hang et al.[116] proposed a collaborative decision-making framework for multi-lane merging by combining game theory methods, which adapts to different driving characteristics for CAVs at the multi-lane merging zone. This decision-making framework ensures the safety and efficiency of CAVs in complex and dynamic traffic conditions while taking into account the objectives of individual vehicles. But more than that, we should note that the merging of mixed-vehicle platoons should be studied more often. In the next two decades, CAVs and human-driven vehicles will co-exist for a long time. How to achieve a high degree of collaboration between CAVs and human-driven vehicles is a key part of achieving road traffic intelligence.
4.4. Multi-vehicle cooperative driving at intersections
At intersections, multi-vehicle cooperative driving can be used to facilitate efficient and safe maneuvering of vehicles through the intersection by enabling communication and collaboration between the vehicles. Specifically, MVCC systems use V2V and vehicle-to-infrastructure (V2I) communication to share information about vehicle positions, speeds, and intended movements. This information is then used to optimize the coordination and sequencing of vehicle movements, thereby reducing congestion and increasing safety at the intersection. Additionally, multi-vehicle cooperative driving may employ advanced sensing and control technologies, such as lidar, radar, and camera systems, to enhance the accuracy and reliability of the system. Overall, in urban road conditions, intersections are often more prone to traffic jams and collisions, multi-vehicle collaboration and vehicle-road collaboration can greatly alleviate traffic congestion in intersection scenarios on urban roads. A systematic review of theories and experiments on multi-vehicle collaboration at intersections is presented by Zhang et al. [117]. The authors propose that it is important to strengthen the understanding and knowledge of the coming new hybrid traffic flow, to improve the control capability of the new hybrid traffic flow, and to promote the development of cooperative control technic of intelligent and connected vehicles in the new hybrid traffic flow oriented to traffic efficiency. Complex intersections are divided into two main categories, namely intersections with and without traffic signals. The proposed co-driving solutions for different intersection types also differ significantly. For intersections with traffic control signals, the main solution is to rely on vehicle-road cooperation and vehicle-vehicle cooperation. The traffic signal agent obtains real-time vehicle status information to dynamically adjust the traffic control signal, thus improving the traffic efficiency of the intersection, while vehicle-vehicle cooperation can ensure traffic safety [98]. In contrast, at intersections lacking traffic control signals, connected vehicles rely mainly on vehicle-to-vehicle collaboration and movement prediction of environmental vehicles and pedestrians to make reasonable and safe decisions.
4.4.1. Unsignalized intersections with regular right-of-way
Typically, common right-of-way rules make it less difficult for vehicles to make driving decisions at unsignalized intersections. In order to reduce the rate of intersection collisions, Deng et al. [118] proposed a method for resolving multi-vehicle collision conflicts that guarantees traffic safety and efficiency. This method consists of a Speed-based Intersection Coordination Model (SICM) and a Geometry-based Intersection Coordination Algorithm (TICA). The SICM model takes the designed speed as the decision variable to reduce the difficulty of controlling the overall vehicle speed and determines the constraints in the case of multi-vehicle collisions. The TICA algorithm assigns spatial and temporal resources of the intersection by transforming time blocks into combinatorial optimization, to pursue higher computing efficiency and shorter computation time. However, a major drawback of this speed- and geometry-based method is that it requires extremely high wireless communication quality, including extremely low latency and extremely low data packet loss. When time-varying communication delays occur, cooperative control degrades, thus affecting the safety and efficiency of traffic flow through the intersection. In [119], a networked predictive control method has been proposed based on an improved model-free adaptive predictive control approach and a distributed collaborative control scheme for multi-intersection scenarios. The approach achieves collaborative control for multiple vehicles in signal-free multi-intersection systems under time-varying communication delays. It consists of a multi-intersection edge cloud networked predictive control layer and a multi-vehicle car-following control layer. By using an edge computing controller, a moving horizon predictive control approach based on a compact form of dynamic linearization technique can be employed to compute the control targets. Then, the signal-free multi-intersection system is decoupled into multiple interconnected control intersection subsystems, and an expected speed is assigned for each target vehicle entering the intersection subsystem. Li et al. [120] proposed a game theory framework for simulating the interactive behaviors of vehicles in uncontrolled intersection scenarios with multiple cars. The method takes into account the common traffic rules and designates a leader-follower relationship between each pair of interacting vehicles. A model based on paired leader-follower relationships is used to express the decision-making process of vehicles’ interactions. The interactive decision model is combined with a parameterized intersection model, enabling the modeling and simulation of interactive traffic situations in various uncontrolled intersections.
4.4.2. Unsignalized intersections without regular right-of-way
The collaboration of CAVs at signal-free intersections has the potential to eliminate time losses associated with traffic signal green light times and improve traffic efficiency. Existing research on signal-free intersection collaboration mostly considers fixed lane directions, which only allow specific turning behaviors for vehicles on each lane. However, fixed lane directions may result in inefficiencies at intersections due to changes in traffic volumes and the proportion of vehicles with different turning expectations over time. Cai et al. [121] propose a method for signal-free intersection collaboration with flexible lane directions for multi-lane roads. This approach calculates the two-dimensional distribution of vehicles and arranges non-conflicting vehicles to pass through the intersection simultaneously. A formation reconstruction method is employed to achieve non-colliding longitudinal and lateral position adjustments of vehicles. Simulations were conducted with different input traffic volumes and turning ratios of passing vehicles, and the results demonstrate that this method outperforms both fixed lane direction signal-free intersection collaboration and signal-controlled intersection methods. In consideration of the absence of clear right-of-way priorities, Cheng et al. [122] integrate game theory into decision-making to provide the system with evolving cooperative and non-cooperative strategies. When the system chooses to cooperate in driving, it takes into account the conflicting relationships with adjacent vehicles and plans joint actions to optimize the overall benefits of multiple vehicles based on cooperative game theory. When the system is unable to engage in cooperative driving or respond within the time limit, the vehicle unit will adopt a non-cooperative driving approach, optimizing its trajectory only for personal gain. The proposed model can provide stability and robustness to our system, effectively addressing conflict resolution issues in intersections with unclear right-of-way priorities. Similarly, for such non-fixed-lane intersections, Ge et al. [123] indicate that collisions can be avoided by allowing neighboring vehicles to exchange their intentions. Based on this premise, the addition of a real-time distributed MPC controller allows heterogeneous traffic to efficiently and safely traverse unsignalized intersections without assuming a fixed path of vehicles or assigning any priority among them.
4.5. Multi-vehicle cooperative parking
In modern cities, especially in cities with high car densities, parking has become a laborious and tedious task. In areas with more vehicles and complex environments, parking becomes a challenge. Inefficient parking tends to cause vehicle congestion in the area and reduces the operational efficiency of the parking lot. Although automatic parking technology is becoming more and more mature [124], this function only considers its own parking task and does not bring significant improvement to the operational efficiency of the whole area. The development of V2V communication and vehicle-to-infrastructure (V2I) communication brings the possibility to optimize the efficiency of parking in a specific area. The collaboration between vehicles and vehicles, and between vehicles and infrastructure, equipped with an intelligent scheduling system, can greatly improve the speed and efficiency of parking within a parking area.
4.5.1. System framework for multi-vehicle cooperative parking
The development of automated valet parking (AVP) has progressed for several years, aimed at reducing accidents and improving parking lot efficiency. The Japan Automobile Research Institute (JARI) has been commissioned to develop AVP systems and has been promoting them since 2016. In order to put AVP into practical use, DENSO TEN Limited believes that the early practical use of AVP can be verified by coordinating the following three elements: "AVP-equipped vehicles", "control centers", and "parking lot infrastructure", in order to ensure safety [125]. Based on similar ideas and strategies, Kneissl et al. [97] proposed a distributed multi-vehicle control architecture for automatic valet parking by distributing the trajectory generation between vehicles and infrastructure. Thanks to V2V communication and V2I communication, potential collision areas can be known and these potential collision areas are then taken into account in the coordination procedure. The above strategy framework is mainly developed for CAVs and has not shown its usability for multi-vehicle cooperative parking problems in mixed scenarios. The planning and coordination strategy introduced by Kessler et al. [126] is suitable for resolving conflicts that occur in parking scenarios involving autonomous and non-cooperative human-driven vehicles in mixed traffic. By quantifying the estimated intentions of non-communicating vehicles and considering these results in the optimization program, a good conflict-free solution can be found, and an optimized trajectory plan can be calculated. It balances the intentions of oneself and other participants, avoiding collisions. The algorithm is symmetric among vehicles, and it does not favor any particular vehicle. Fair, selfish, or altruistic behaviors are modeled in the optimization objective function through appropriate weights. This method resolves conflicts that occur in multi-vehicle parking situations and has been demonstrated in simulated scenarios.
4.5.2. Motion planning for multi-vehicle cooperative parking
In [127], the autonomous parking trajectory planning problem is transformed into an optimal control problem. The shortest parking time is set as the optimal cost function, and the optimal control problem is discretized using the Gaussian pseudospectral method. The results show that this method can effectively solve the trajectory planning problem of multi-vehicle cooperative autonomous parking. Cooperative parking motion planning for MVSs involves computing feasible trajectories for multiple vehicles, essentially solving an optimization problem. There are two main approaches to solving this motion planning problem: centralized and decentralized. Centralized computation involves computing trajectories for all vehicles at once, producing high-quality solutions but with low computational efficiency. On the other hand, decentralized computation involves partitioning the original problem into smaller subproblems and then combining them, which leads to higher computational efficiency. Li et al. [128] propose a progressive constraint dynamic optimization (PCDO) framework to alleviate the burden of centralized computation. Specifically, PCDO discards redundant constraints during the solution process to reduce problem size and facilitate problem-solving. The results show that this computational framework is effective in solving the cooperative parking motion planning problem for MVSs and outperforms traditional centralized approaches. Additionally, more research on trajectory planning and coordination strategies for MVSs was carried out in [126, 129, 130].
5. Conclusion and Future Research
5.1. Conclusion
In this paper, we provide a review of the basic system structure, control methods, and application of MVCC in modern intelligent transportation. Among them, the basic MVCC system structure and strategy are introduced in detail. In addition, we present and analyze the application and development of PID control, linear consensus control, optimal control, and RL in MVCC systems. Moreover, we also comprehensively review the applications of MVCC, including multi-vehicle platooning, cooperative lane changing, cooperative merging, intersection passing, and cooperative parking. Numerous research results on MVCC indicate that MVCC has great potential to improve traffic efficiency, reduce congestion, and enhance driving safety. However, several challenges still need to be addressed before the MVCC can be widely applied. The reliability and security of wireless communication need to be improved, as the unreliability of V2X communication can directly affect the performance of the MVCC system. For example, it can cause degradation of the CACC system and increase the risk of vehicle collisions. It can cause time lag or lane-changing failure of vehicle cooperative lane-changing, which increases the risk of traffic accidents. Insecure V2X communication is susceptible to hacking and can cause serious safety incidents. Moreover, the development of algorithms that can handle complex and uncertain traffic scenarios is another critical research challenge. Since human-driven vehicles without V2V communication, vehicles with some ADAS, and vehicles with fully autonomous driving capabilities will co-exist for a long time, it is necessary to develop an MVCC system that accommodates mixed traffic. Integration of the MVCC system with existing traffic infrastructure and the establishment of standardized communication protocols to ensure interoperability between different vehicles and systems are also significant challenges that need to be addressed.
5.2. Future research
Despite these challenges, the future of MVCC is promising, and there are several potential research directions that can help overcome these challenges and further advance this technology.
Cybersecurity for MVCC system: With the increasing use of wireless communication and V2V communication systems, cybersecurity has become a critical research area. The deployment of MVCC systems introduces new cybersecurity and privacy challenges, including the protection of data transmission and the prevention of cyber-attacks [131]. Future research can focus on developing secure and privacy-preserving communication protocols and intrusion detection systems to ensure the safe and reliable operation of MVCC systems.
Integration of MVCC with intelligent transportation systems: The integration of MVCC with intelligent transportation systems (ITS) can enhance overall traffic management and control. Future research can focus on developing an integrated framework that can utilize real-time data from ITS to improve the performance of MVCC systems [132‒ 134].
Multi-Agent Reinforcement Learning: The application of RL to the MVCC system is a promising research direction. RL has demonstrated significant potential for handling complex and uncertain traffic scenarios. However, the traditional RL approach is limited to single-agent environments. Therefore, multi-agent reinforcement learning (MARL) should be explored to develop cooperative control strategies for multiple vehicles [72].
Cooperative control strategies for heterogeneous MVSs: Human-driven vehicles and connected smart vehicles will co-exist in the long term. It is essential to develop cooperative control strategies and algorithms that can adapt to such complex hybrid heterogeneous MVSs. The core elements of this include the prediction of the behavior of human-driven vehicles and the study of the stability of heterogeneous MVSs [73].
Safety of the intended functionality (SOTIF) in the multi-vehicle cooperative area: Today, the practical application of the MVCC system relies heavily on platooning technology and the CACC system. The CACC system is gradually becoming a standard feature of smart cars. However, due to the limitations of system design, algorithms, sensors, and communication devices, scenarios of MVCC system failure are bound to occur. Therefore, it is necessary to strengthen the research and exploration of SOTIF in the field of multi-vehicle collaboration. This involves how to generate a sufficient number of system failure scenarios and how to quickly and comprehensively complete the test verification of MVCC system [135, 136].
In conclusion, MVCC has significant potential for improving traffic safety and efficiency and reducing environmental impacts. The proposed future research directions can provide a roadmap for the development of MVCC and facilitate the realization of its full potential.
Author Contributions: Conceptualization, S.X.; writing—original draft preparation, S.X., Z.L.; writing—review and editing, Z.D., Z.L., F.A. All authors have read and agreed to the published version of the manuscript.
Funding: This research received no external funding.
Data Availability Statement: Not applicable.
Conflicts of Interest: The authors declare no conflict of interest.
References
- Shladover, S.E. PATH at 20—History and major milestones. IEEE Transactions on Intelligent Transportation Systems 2007, 8(4), 584–592. DOI: https://doi.org/10.1109/TITS.2007.903052
- Chang, K.S.; Li, W.; Devlin, P.; et al. Experimentation with a vehicle platoon control system. In Vehicle Navigation and Information Systems Conference. IEEE: Piscataway, NJ, USA, 1991, Vol. 2, pp. 1117–1124.
- Milanés, V.; Shladover, S.E.; Spring, J.; et al. Cooperative adaptive cruise control in real traffic situations. IEEE Transactions on Intelligent Transportation Systems 2013, 15(1), 296–305. DOI: https://doi.org/10.1109/TITS.2013.2278494
- Liu, H.; Kan, X.; Wei, D.; et al. Using cooperative adaptive cruise control (CACC) to formhigh-performance vehicle streams. 2018. Available online: https://path.berkeley.edu/sites/default/files/general/simulation_methodology_reviewdraft.pdf (Accessed on 25 April 2023).
- Shladover, S.; Lu, X.Y.; Yang, S.; et al. Cooperative adaptive cruise control (CACC) for partially automated truck platooning. 2018. Available online: https://escholarship.org/content/qt260060w4/qt260060w4.pdf (Accessed on 25 April 2023).
- Schulze, M. Chauffeur-the european way towards an automated highway system. In Mobility for Everyone. 4th World Congress on Intelligent Transport Systems, 21–24 October 1997, Berlin, Germany. (Paper No. 2311).
- Maiti, S.; Winter, S.; Kulik, L. A conceptualization of vehicle platoons and platoon operations. Transportation Research Part C: Emerging Technologies 2017, 80, 1–19. DOI: https://doi.org/10.1016/j.trc.2017.04.005
- Larburu, M.; Urquiza, A.; Sanchez, J. Safe Road Trains for the Environment (SARTRE): Validation of SARTRE Platoon service and the SARTRE HMI. In 19th ITS World CongressERTICO-ITS EuropeEuropean CommissionITS AmericaITS Asia-Pacific. 22–26 October 2012, Vienna, Austria.
- Bergenhem, C.; Huang, Q.; Benmimoun, A.; et al. Challenges of platooning on public motorways. In 17th World Congress on Intelligent Transport Systems. 2010, pp. 1–12. Available online: https://trimis.ec.europa.eu/sites/default/files/project/documents/20130204_115543_96121_SARTRE_ConferencePaper1.pdf (Accessed on 25 April 2023).
- Adolfson, M. Cooperative dynamic formation of platoons for safe and energy-optimized goods transportation. In 93rd Annual Meeting of the Transportation Research Board, Washington, DC, USA (Oral presentation), 2014, p. 42. Available online: https://unece.org/DAM/trans/doc/2014/wp29grrf/GRRF-76-43e.pdf (Accessed on 25 April 2023).
- Pezzano, A.; IDIADA, P.D. ENabling SafE Multi-Brand pLatooning for Europe. 2020. Available online: https://platooningensemble.eu/storage/uploads/documents/2023/03/10/ENSEMBLE-D2.14-Final_version_Hazard_Analysis_and_Risk_Assessment_and_Functional_Safety_Concept_FINAL.pdf (Accessed on 25 April 2023).
- Willemsen, D.M.; Schmeitz, A.J.; Mascalchi, E. EU ENSEMBLE Project: Specification of an Interoperable Solution for a Support Function for Platooning. IEEE Transactions on Intelligent Transportation Systems 2023, 24(6), 5705–5718. DOI: https://doi.org/10.1109/TITS.2023.3262397
- Soto, I.; Calderon, M.; Amador, O.; et al. A survey on road safety and traffic efficiency vehicular applications based on C-V2X technologies. Vehicular Communications 2022, 33, 100428. DOI: https://doi.org/10.1016/j.vehcom.2021.100428
- Lioris, J.; Pedarsani, R.; Tascikaraoglu, F.Y.; et al. Platoons of connected vehicles can double throughput in urban roads. Transportation Research Part C: Emerging Technologies 2017, 77, 292–305. DOI: https://doi.org/10.1016/j.trc.2017.01.023
- Lee, J.; Huang, H.; Wang, J.; et al. Road safety under the environment of intelligent connected vehicles. Accident Analysis & Prevention 2022, 170, 106645. DOI: https://doi.org/10.1016/j.aap.2022.106645
- Kopelias, P.; Demiridi, E.; Vogiatzis, K.; et al. Connected & autonomous vehicles–Environmental impacts–A review. Science of the Total Environment 2020, 712, 135237. DOI: https://doi.org/10.1016/j.scitotenv.2019.135237
- Qu, D.Y.; Zhao, Z.X.; Song, H.; et al. (). Design of Vehicle–Road Cooperative Assistant Decision System for Active Safety at Intersections. Journal of transportation engineering, Part A: Systems 2022, 148(5), 04022022. DOI: https://doi.org/10.1061/JTEPBS.0000675
- Wang, J.; Ma, F.; Yu, Y.; et al. Optimization design of the decentralized multi-vehicle cooperative controller for freeway ramp entrance. International Journal of Automotive Technology 2021, 22, 799–810. DOI: https://doi.org/10.1007/s12239-021-0073-8
- Ploeg, J.; Scheepers, B.T.; Van Nunen, E.; et al. (2011, October). Design and experimental evaluation of cooperative adaptive cruise control. In 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC), 05–07 October 2011, Washington, DC, USA, pp. 260–265. IEEE: Piscataway, NJ, USA. DOI: https://doi.org/10.1109/ITSC.2011.6082981
- Naus, G.J.; Vugts, R.P.; Ploeg, J.; et al. String-stable CACC design and experimental validation: A frequency-domain approach. IEEE Transactions on Vehicular Technology 2010, 59(9), 4268–4279.
- Knorn, S.; Donaire, A.; Agüero, J.C.; et al. Passivity-based control for multi-vehicle systems subject to string constraints. Automatica 2014, 50(12), 3224–3230. DOI: https://doi.org/10.1016/j.automatica.2014.10.038
- Wang, Z.; Wu, G.; Barth, M.J. (2018, November). A review on cooperative adaptive cruise control (CACC) systems: Architectures, controls, and applications. In 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE: Piscataway, NJ, USA, pp. 2884–2891. DOI: https://doi.org/10.1109/ITSC.2018.8569947
- Zheng, Y.; Li, S.E.; Wang, J.; et al. Stability and scalability of homogeneous vehicular platoon: Study on the influence of information flow topologies. IEEE Transactions on Intelligent Transportation Systems 2015, 17(1), 14–26. DOI: https://doi.org/10.1109/TITS.2015.2402153
- Li, S.E.; Zheng, Y.; Li, K.; et al. (, June). An overview of vehicular platoon control under the four-component framework. In 2015 IEEE Intelligent Vehicles Symposium (IV). IEEE: Piscataway, NJ, USA, 2015, pp. 286–291. DOI: https://doi.org/10.1109/IVS.2015.7225700
- He, Y.; Ciuffo, B.; Zhou, Q.; et al. Adaptive cruise control strategies implemented on experimental vehicles: A review. IFAC-PapersOnLine 2019, 52(5), 21–27. DOI: https://doi.org/10.1016/j.ifacol.2019.09.004
- Rajamani, R. Vehicle Dynamics and Control. Springer Science & Business Media: Berlin, Germany, 2011. DOI: https://doi.org/10.1007/978-1-4614-1433-9_2
- Xiao, L.; Gao, F. A comprehensive review of the development of adaptive cruise control systems. Vehicle System Dynamics 2010, 48(10), 1167–1192. DOI: https://doi.org/10.1080/00423110903365910
- Pananurak, W.; Thanok, S.; Parnichkun, M. Adaptive cruise control for an intelligent vehicle. In 2008 IEEE International Conference on Robotics and Biomimetics. IEEE: Piscataway, NJ, USA, 2009, pp. 1794–1799. DOI: https://doi.org/10.1109/ROBIO.2009.4913274
- Chen, J.; Zhou, Y.; Liang, H. Effects of ACC and CACC vehicles on traffic flow based on an improved variable time headway spacing strategy. IET Intelligent Transport Systems 2019, 13(9), 1365–1373. DOI: https://doi.org/10.1049/iet-its.2018.5296
- Swaroop, D.; Hedrick, J.K.; Chien, C.C.; et al. A comparision of spacing and headway control laws for automatically controlled vehicles1. Vehicle System Dynamics 1994, 23(1), 597–625. DOI: https://doi.org/10.1080/00423119408969077
- Zhou, J.; Peng, H. Range policy of adaptive cruise control vehicles for improved flow stability and string stability. IEEE Transactions on Intelligent Transportation Systems 2005, 6(2), 229–237. DOI: https://doi.org/10.1109/TITS.2005.848359
- Weinberger, M.; Winner, H.; Bubb, H. Adaptive cruise control field operational test—the learning phase. JSAE Review 2001, 22(4), 487–494. DOI: https://doi.org/10.1016/S0389-4304(01)00142-4
- Prestl, W.; Sauer, T.; Steinle, J.; et al. The BMW active cruise control ACC. SAE Technical Paper 2000, No. 2000-01-0344. DOI: https://doi.org/10.4271/2000-01-0344
- Kumar, R.; Pathak, R. Adaptive cruise control-towards a safer driving experience. International Journal of Scientific and Engineering Research 2012, 3(8), 3–7.
- Kesting, A.; Treiber, M.; Schönhof, M.; et al. Jam-avoiding adaptive cruise control (ACC) and its impact on traffic dynamics. In Traffic and Granular Flow’05. Springer Berlin Heidelberg, Germany, 2007, pp. 633–643. DOI: https://doi.org/10.1007/978-3-540-47641-2_62
- Venhovens, P.; Naab, K.; Adiprasito, B. (). Stop and go cruise control. SAE Technical Paper 2000, No. 2000-05-0368.
- Zhang, Y.; Lin, Q.; Wang, J.; et al. Lane-change intention estimation for car-following control in autonomous driving. IEEE Transactions on Intelligent Vehicles 2018, 3(3), 276–286. DOI: https://doi.org/10.1109/TIV.2018.2843178
- Miyata, S.; Nakagami, T.; Kobayashi, S.; et al. Improvement of adaptive cruise control performance. EURASIP Journal on Advances in Signal Processing 2010, 2010, 1–8. DOI: https://doi.org/10.1155/2010/295016
- Milanés, V.; Shladover, S.E. Modeling cooperative and autonomous adaptive cruise control dynamic responses using experimental data. Transportation Research Part C: Emerging Technologies 2014, 48, 285–300. DOI: https://doi.org/10.1016/j.trc.2014.09.001
- Wischhof, L.; Ebner, A.; Rohling, H. Information dissemination in self-organizing intervehicle networks. IEEE Transactions on Intelligent Transportation Systems 2005, 6(1), 90–101. DOI: https://doi.org/10.1109/TITS.2004.842407
- Uhlemann, E. Connected-vehicles applications are emerging [connected vehicles]. IEEE Vehicular Technology Magazine 2016, 11(1), 25–96. DOI: https://doi.org/10.1109/MVT.2015.2508322
- Xiao, L.; Wang, M.; Schakel, W.; et al. Unravelling effects of cooperative adaptive cruise control deactivation on traffic flow characteristics at merging bottlenecks. Transportation research part C: Emerging Technologies 2018, 96, 380–397. DOI: https://doi.org/10.1016/j.trc.2018.10.008
- Porfyri, K.N.; Mintsis, E.; Mitsakis, E. Assessment of ACC and CACC systems using SUMO. EPiC Series in Engineering 2018, 2, 82–93.
- Xiao, L.; Wang, M.; Van Arem, B. Realistic car-following models for microscopic simulation of adaptive and cooperative adaptive cruise control vehicles. Transportation Research Record 2017, 2623(1), 1–9. DOI: https://doi.org/10.3141/2623-01
- Stanger, T.; del Re, L. A model predictive cooperative adaptive cruise control approach. In 2013 American control conference. IEEE: Piscataway, NJ, USA, 2013, pp. 1374–1379. DOI: https://doi.org/10.1109/ACC.2013.6580028
- Wang, C.; Gong, S.; Zhou, A.; et al. Cooperative adaptive cruise control for connected autonomous vehicles by factoring communication-related constraints. Transportation Research Part C: Emerging Technologies 2020, 113, 124–145. DOI: https://doi.org/10.1016/j.trc.2019.04.010
- Gong, S.; Zhou, A.; Peeta, S. Cooperative adaptive cruise control for a platoon of connected and autonomous vehicles considering dynamic information flow topology. Transportation Research Record 2019, 2673(10), 185–198. DOI: https://doi.org/10.1177/0361198119847473
- Gong, L.; Luo, L.; Wang, H.; et al. Adaptive cruise control design based on fuzzy-PID. In 2010 International Conference on E-Product E-Service and E-Entertainment. IEEE: Piscataway, NJ, USA, 2010, pp. 1–4. DOI: https://doi.org/10.1109/ICEEE.2010.5660689
- Yang, J.; Liu, X.; Liu, S.; et al. Longitudinal tracking control of vehicle platooning using DDPG-based PID. In 2020 4th CAA International Conference on Vehicular Control and Intelligence (CVCI). IEEE: Piscataway, NJ, USA, 2020, pp. 656–661. DOI: https://doi.org/10.1109/CVCI51460.2020.9338516
- Wang, J.; Hu, X. Distributed consensus in multi-vehicle cooperative control: Theory and Applications (Ren, W. and Beard, RW; 2008)[Book Shelf]. IEEE Control Systems Magazine 2010, 30(3), 85–86. DOI: https://doi.org/10.1109/MCS.2010.936430
- Wang, L.Y.; Syed, A.; Yin, G.G.; et al. Control of vehicle platoons for highway safety and efficient utility: Consensus with communications and vehicle dynamics. Journal of Systems Science and Complexity 2014, 27, 605–631. DOI: https://doi.org/10.1007/s11424-014-2115-z
- Di Bernardo, M.; Salvi, A.; Santini, S. Distributed consensus strategy for platooning of vehicles in the presence of time-varying heterogeneous communication delays. IEEE Transactions on Intelligent Transportation Systems 2014, 16(1), 102–112. DOI: https://doi.org/10.1109/TITS.2014.2328439
- Li, Y.; Tang, C.; Li, K.; et al. Consensus-based cooperative control for multi-platoon under the connected vehicles environment. IEEE Transactions on Intelligent Transportation Systems 2018, 20(6), 2220–2229. DOI: https://doi.org/10.1109/TITS.2018.2865575
- Hu, J.; Bhowmick, P.; Arvin, F.; et al. Cooperative control of heterogeneous connected vehicle platoons: An adaptive leader-following approach. IEEE Robotics and Automation Letters 2020, 5(2), 977–984. DOI: https://doi.org/10.1109/LRA.2020.2966412
- Li, Y.; Tang, C.; Peeta, S.; et al. Nonlinear consensus-based connected vehicle platoon control incorporating car-following interactions and heterogeneous time delays. IEEE Transactions on Intelligent Transportation Systems 2018, 20(6), 2209–2219. DOI: https://doi.org/10.1109/TITS.2018.2865546
- Wang, W.; Wang, C.; Wang, Z.; et al. (). Nonlinear consensus-based autonomous vehicle platoon control under event-triggered strategy in the presence of time delays. Applied Mathematics and Computation 2021, 404, 126246. DOI: https://doi.org/10.1016/j.amc.2021.126246
- Li, Y.; Wu, Y.; He, S. Distributed consensus control for a group of autonomous marine vehicles with nonlinearity and external disturbances. Neurocomputing 2021, 443, 380–387. DOI: https://doi.org/10.1016/j.neucom.2020.12.058
- Yang, P.; Tang, Y.; Yan, M.; et al. Consensus based control algorithm for nonlinear vehicle platoons in the presence of time delay. International Journal of Control, Automation and Systems 2019, 17, 752–764. DOI: https://doi.org/10.1007/s12555-017-0600-6
- Wang, Z.; Wu, G.; Hao, P.; et al. Developing a platoon-wide eco-cooperative adaptive cruise control (CACC) system. In 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE: Piscataway, NJ, USA, 2017, pp. 1256–1261. DOI: https://doi.org/10.1109/IVS.2017.7995884
- Li, Y.; Tang, C.; Li, K.; et al. Nonlinear finite-time consensus-based connected vehicle platoon control under fixed and switching communication topologies. Transportation Research Part C: Emerging Technologies 2018, 93, 525–543. DOI: https://doi.org/10.1016/j.trc.2018.06.013
- Yu, G.; Wong, P.K.; Huang, W.; et al. Distributed adaptive consensus protocol for connected vehicle platoon with heterogeneous time-varying delays and switching topologies. IEEE Transactions on Intelligent Transportation Systems 2022, 23(10), 17620–17631. DOI: https://doi.org/10.1109/TITS.2022.3170437
- Yang, H.; Rakha, H.; Ala, M.V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects. IEEE Transactions on Intelligent Transportation Systems 2016, 18(6), 1575–1585. DOI: https://doi.org/10.1109/TITS.2016.2613740
- Turri, V.; Besselink, B.; Johansson, K.H. Cooperative look-ahead control for fuel-efficient and safe heavy-duty vehicle platooning. IEEE Transactions on Control Systems Technology 2016, 25(1), 12–28. DOI: https://doi.org/10.1109/TCST.2016.2542044
- Van De Hoef, S.; Johansson, K.H.; Dimarogonas, D.V. Fuel-efficient en route formation of truck platoons. IEEE Transactions on Intelligent Transportation Systems 2017, 19(1), 102–112. DOI: https://doi.org/10.1109/TITS.2017.2700021
- Zohdy, I.H.; Rakha, H. Game theory algorithm for intersection-based cooperative adaptive cruise control (CACC) systems. In 2012 15th International IEEE Conference on Intelligent Transportation Systems. IEEE: Piscataway, NJ, USA, 2012, pp. 1097–1102. DOI: https://doi.org/10.1109/ITSC.2012.6338644
- Kianfar, R.; Falcone, P.; Fredriksson, J. A receding horizon approach to string stable cooperative adaptive cruise control. In 2011 14th International IEEE Conference on Intelligent Transportation Systems (ITSC). IEEE: Piscataway, NJ, USA, 2011, pp. 734–739. DOI: https://doi.org/10.1109/ITSC.2011.6083088
- Bu, F.; Tan, H.S.; Huang, J. Design and field testing of a cooperative adaptive cruise control system. In Proceedings of the 2010 American Control Conference. IEEE: Piscataway, NJ, USA, 2010, pp. 4616–4621.
- Tapli, T.; Akar, M. Cooperative adaptive cruise control algorithms for vehicular platoons based on distributed model predictive control. In 2020 IEEE 16th International Workshop on Advanced Motion Control (AMC). IEEE: Piscataway, NJ, USA, 2020, pp. 305–310. DOI: https://doi.org/10.1109/AMC44022.2020.9244429
- Nie, G.; Xie, B.; Hao, Z.; et al. A distributed model predictive control approach to cooperative adaptive cruise control of the heterogeneous platoon. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering 2022, 236(14), 3153–3167. DOI: https://doi.org/10.1177/09544070211070526
- Farag, A.; AbdelAziz, O.M.; Hussein, A.; et al. Reinforcement Learning Based Approach for Multi-Vehicle Platooning Problem with Nonlinear Dynamic Behavior. 2020. Available online: https://www.researchgate.net/profile/Amr-Ramadan-6/publication/349313418_Reinforcement_Learning_Based_Approach_for_Multi-Vehicle_Platooning_Problem_with_Nonlinear_Dynamic_Behavior/links/602a65ec92851c4ed57317a3/Reinforcement-Learning-Based-Approach-for-Multi-Vehicle-Platooning-Problem-with-Nonlinear-Dynamic-Behavior.pdf (Accessed on 25 April 2023).
- Lu, S.; Cai, Y.; Chen, L.; et al. A sharing deep reinforcement learning method for efficient vehicle platooning control. IET Intelligent Transport Systems 2022, 16(12), 1697–1709. DOI: https://doi.org/10.1049/itr2.12120
- Peake, A.; McCalmon, J.; Raiford, B.; et al. Multi-agent reinforcement learning for cooperative adaptive cruise control. In 2020 IEEE 32nd International Conference on Tools with Artificial Intelligence (ICTAI). IEEE: Piscataway, NJ, USA, 2020, pp. 15–22. DOI: https://doi.org/10.1109/ICTAI50040.2020.00013
- Shi, H.; Zhou, Y.; Wu, K.; et al. Connected automated vehicle cooperative control with a deep reinforcement learning approach in a mixed traffic environment. Transportation Research Part C: Emerging Technologies 2021, 133, 103421. DOI: https://doi.org/10.1016/j.trc.2021.103421
- Feng, S.; Zhang, Y.; Li, S.E.; et al. String stability for vehicular platoon control: Definitions and analysis methods. Annual Reviews in Control 2019, 47, 81–97. DOI: https://doi.org/10.1016/j.arcontrol.2019.03.001
- Naus, G.J.; Vugts, R.P.; Ploeg, J.; et al. String-stable CACC design and experimental validation: A frequency-domain approach. IEEE Transactions on Vehicular Technology 2010, 59(9), 4268–4279. DOI: https://doi.org/10.1109/TVT.2010.2076320
- Khatir, M.E.; Davidson, E.J. Bounded stability and eventual string stability of a large platoon of vehicles using non-identical controllers. In 2004 43rd IEEE Conference on Decision and Control (CDC)(IEEE Cat. No. 04CH37601). IEEE: Piscataway, NJ, USA, 2004, Vol. 1, pp. 1111–1116. DOI: https://doi.org/10.1109/CDC.2004.1428841
- Jin, I.G.; Orosz, G. Optimal control of connected vehicle systems with communication delay and driver reaction time. IEEE Transactions on Intelligent Transportation Systems 2016, 18(8), 2056–2070. DOI: https://doi.org/10.1109/TITS.2016.2633164
- Swaroop, D.; Hedrick, J. K. String stability of interconnected systems. IEEE Transactions on Automatic Control 1996, 41(3), 349–357. DOI: https://doi.org/10.1109/9.486636
- Mokogwu, C.N.; Hashtrudi-Zaad, K. Energy-based analysis of string stability in vehicle platoons. IEEE Transactions on Vehicular Technology 2022, 71(6), 5915–5929. DOI: https://doi.org/10.1109/TVT.2022.3158624
- Shladover, S.E.; Nowakowski, C.; Lu, X.Y.; et al. Cooperative adaptive cruise control: Definitions and operating concepts. Transportation Research Record 2015, 2489(1), 145–152. DOI: https://doi.org/10.3141/2489-17
- Xing, H.; Ploeg, J.; Nijmeijer, H. Compensation of communication delays in a cooperative ACC system. IEEE Transactions on Vehicular Technology 2019, 69(2), 1177–1189. DOI: https://doi.org/10.1109/TVT.2019.2960114
- Zhang, Y.; Bai, Y.; Wang, M.; et al. Cooperative adaptive cruise control with robustness against communication delay: An approach in the space domain. IEEE Transactions on Intelligent Transportation Systems 2020, 22(9), 5496–5507. DOI: https://doi.org/10.1109/TITS.2020.2987746
- Maxim, A.; Pauca, O.; Caruntu, C.F.; et al. Distributed model predictive control algorithm with time-varying communication delays for a CACC vehicle platoon. In 2020 24th International Conference on System Theory, Control and Computing (ICSTCC). IEEE: Piscataway, NJ, USA, 2020, pp. 775–780. DOI: https://doi.org/10.1109/ICSTCC50638.2020.9259772
- Ploeg, J.; van de Wouw, N.; Nijmeijer, H. Fault tolerance of cooperative vehicle platoons subject to communication delay. IFAC-PapersOnLine 2015, 48(12), 352–357. DOI: https://doi.org/10.1016/j.ifacol.2015.09.403
- Tian, B.; Deng, X.; Xu, Z.; et al. Modeling and numerical analysis on communication delay boundary for CACC string stability. IEEE Access 2019, 7, 168870–168884. DOI: https://doi.org/10.1109/ACCESS.2019.2954978
- Ploeg, J.; Semsar-Kazerooni, E.; Lijster, G.; et al. Graceful degradation of CACC performance subject to unreliable wireless communication. In 16th International IEEE Conference on Intelligent Transportation Systems (ITSC 2013). IEEE: Piscataway, NJ, USA, 2013, pp. 1210–1216. DOI: https://doi.org/10.1109/ITSC.2013.6728397
- Acciani, F.; Frasca, P.; Heijenk, G.; et al. Stochastic string stability of vehicle platoons via cooperative adaptive cruise control with lossy communication. IEEE Transactions on Intelligent Transportation Systems 2021, 23(8), 10912–10922. DOI: https://doi.org/10.1109/TITS.2021.3097199
- Wu, C.; Lin, Y.; Eskandarian, A. Cooperative adaptive cruise control with adaptive Kalman filter subject to temporary communication loss. IEEE Access 2019, 7, 93558–93568. DOI: https://doi.org/10.1109/ACCESS.2019.2928004
- Tu, Y.; Wang, W.; Li, Y.; et al. Longitudinal safety impacts of cooperative adaptive cruise control vehicle's degradation. Journal of Safety Research 2019, 69, 177–192. DOI: https://doi.org/10.1016/j.jsr.2019.03.002
- Lei, C.; Van Eenennaam, E.M.; Wolterink, W.K.; et al. Impact of packet loss on CACC string stability performance. In 2011 11th International Conference on ITS Telecommunications. IEEE: Piscataway, NJ, USA, 2011, pp. 381–386. DOI: https://doi.org/10.1109/ITST.2011.6060086
- Razzaghpour, M.; Shahram, S.; Valiente, R.; et al. Impact of communication loss on mpc based cooperative adaptive cruise control and platooning. In 2021 IEEE 94th Vehicular Technology Conference (VTC2021-Fall). IEEE: Piscataway, NJ, USA, 2021, pp. 1–7. DOI: https://doi.org/10.1109/VTC2021-Fall52928.2021.9625177
- Shladover, S.E. Truck automation operational concept alternatives. In 2010 IEEE Intelligent Vehicles Symposium. IEEE: Piscataway, NJ, USA, 2010, pp. 1072–1077. DOI: https://doi.org/10.1109/IVS.2010.5548061
- Xie, S.; Hu, J.; Bhowmick, P.; et al. Distributed motion planning for safe autonomous vehicle overtaking via artificial potential field. IEEE Transactions on Intelligent Transportation Systems 2022, 23(11), 21531–21547. DOI: https://doi.org/10.1109/TITS.2022.3189741
- Wang, D.; Hu, M.; Wang, Y.; et al. Model predictive control–based cooperative lane change strategy for improving traffic flow. Advances in Mechanical Engineering 2016, 8(2), 1687814016632992. DOI: https://doi.org/10.1177/1687814016632992
- Shi, Y.; Lv, L.; Qi, Y.; et al. A Cooperative Control Algorithm for Real-time On-ramp Merging of Connected and Automated Vehicles. In 2022 IEEE 25th International Conference on Computer Supported Cooperative Work in Design (CSCWD). IEEE: Piscataway, NJ, USA, 2022, pp. 659–664. DOI: https://doi.org/10.1109/CSCWD54268.2022.9776268
- Xie, S.; Hu, J.; Ding, Z.; et al. Cooperative adaptive cruise control for connected autonomous vehicles using spring damping energy model. IEEE Transactions on Vehicular Technology 2022, 72(3), 2974–2987. DOI: https://doi.org/10.1109/TVT.2022.3218575
- Kneissl, M.; Madhusudhanan, A.K.; Molin, A.; et al. A multi-vehicle control framework with application to automated valet parking. IEEE Transactions on Intelligent Transportation Systems 2020, 22(9), 5697–5707. DOI: https://doi.org/10.1109/TITS.2020.2990294
- Guler, S.I.; Menendez, M.; Meier, L. Using connected vehicle technology to improve the efficiency of intersections. Transportation Research Part C: Emerging Technologies 2014, 46, 121–131. DOI: https://doi.org/10.1016/j.trc.2014.05.008
- Kunze, R.; Ramakers, R.; Henning, K.; et al. Organization and operation of electronically coupled truck platoons on German motorways. In Automation, communication and cybernetics in science and engineering 2009/2010. Springer Berlin Heidelberg: Germany, 2011, pp. 427–439. DOI: https://doi.org/10.1007/978-3-642-16208-4_39
- Tsugawa, S. Results and issues of an automated truck platoon within the energy ITS project. In 2014 IEEE Intelligent Vehicles Symposium Proceedings. IEEE: Piscataway, NJ, USA, 2014, pp. 642–647. DOI: https://doi.org/10.1109/IVS.2014.6856400
- Yoshida, J.; Sugimachi, T.; Fukao, T.; et al. Autonomous driving of a truck based on path following control. In Proc. 10th Int. Symposium on Advanced Vehicle Control (CD-ROM). 2010.
- Sugimachi, T.; Fukao, T.; Suzuki, Y.; et al. Development of autonomous platooning system for heavy-duty trucks. IFAC Proceedings Volumes 2013, 46(21), 52–57. DOI: https://doi.org/10.3182/20130904-4-JP-2042.00127
- Ellwanger, S.; Wohlfarth, E. Truck platooning application. In 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE: Piscataway, NJ, USA, 2017, pp. 966–971. DOI: https://doi.org/10.1109/IVS.2017.7995840
- Nowakowski, C.; Shladover, S.E.; Lu, X.Y.; et al. Cooperative adaptive cruise control (CACC) for truck platooning: Operational concept alternatives. 2015.
- Foreman, C.; Keen, M.; Petrella, M.; et al. FHWA Research and Technology Evaluation TechBrief: Truck Platooning (No. FHWA-HRT-22-007). United States. Federal Highway Administration. Research and Technology Evaluation. 2021.
- Shawky, M. Factors affecting lane change crashes. IATSS Research 2020, 44(2), 155–161. DOI: https://doi.org/10.1016/j.iatssr.2019.12.002
- Sun, M.; Chen, Z.; Li, H.; et al. Cooperative Lane-Changing Strategy for Intelligent Vehicles. In 2021 40th Chinese Control Conference (CCC). IEEE: Piscataway, NJ, USA, 2021, pp. 6022–6027. DOI: https://doi.org/10.23919/CCC52363.2021.9549462
- Ni, J.; Han, J.; Dong, F. Multivehicle cooperative lane change control strategy for intelligent connected vehicle. Journal of Advanced Transportation 2020, 2020, 1–10. DOI: https://doi.org/10.1155/2020/8672928
- Kim, H.; Borrelli, F. Facilitating Cooperative and Distributed Multi-Vehicle Lane Change Maneuvers. arXiv preprint 2023, arXiv:2301.04316. DOI: https://doi.org/10.1016/j.ifacol.2023.10.463
- Li, T.; Wu, J.; Chan, C.Y.; et al. A cooperative lane change model for connected and automated vehicles. IEEE Access 2020, 8, 54940–54951. DOI: https://doi.org/10.1109/ACCESS.2020.2981169
- Luo, Y.; Yang, G.; Xu, M.; et al. Cooperative lane-change maneuver for multiple automated vehicles on a highway. Automotive Innovation 2019, 2, 157–168. DOI: https://doi.org/10.1007/s42154-019-00073-1
- Zhang, S.; Deng, G.; Yang, E.; et al. Optimal Vehicle Lane Change Trajectory Planning in Multi-Vehicle Traffic Environments. Applied Sciences 2022, 12(19), 9662. DOI: https://doi.org/10.3390/app12199662
- Hu, Z.; Huang, J.; Yang, Z.; et al. Embedding robust constraint-following control in cooperative on-ramp merging. IEEE Transactions on Vehicular Technology 2021, 70(1), 133–145. DOI: https://doi.org/10.1109/TVT.2021.3049866
- Chen, Y.; Weniuan, E.; Wang, X.; et al. Multi-vehicle Cooperative Confluence Strategy in Freeway Merging Area under New Mixed Traffic Environment. In 2022 5th International Conference on Intelligent Autonomous Systems (ICoIAS). IEEE: Piscataway, NJ, USA, 2022, pp. 358–363. DOI: https://doi.org/10.1109/ICoIAS56028.2022.9931234
- Goli, M.; Eskandarian, A. MPC-based lateral controller with look-ahead design for autonomous multi-vehicle merging into platoon. In 2019 American Control Conference (ACC). IEEE: Piscataway, NJ, USA, 2019, pp. 5284–5291. DOI: https://doi.org/10.23919/ACC.2019.8814967
- Hang, P.; Lv, C.; Huang, C.; et al. Cooperative decision making of connected automated vehicles at multi-lane merging zone: A coalitional game approach. IEEE Transactions on Intelligent Transportation Systems 2021, 23(4), 38293841. DOI: https://doi.org/10.1109/TITS.2021.3069463
- Zhang, L.; Wang, Y.; Zhu, H. Theory and experiment of cooperative control at multi-intersections in intelligent connected vehicle environment: review and perspectives. Sustainability 2022, 14(3), 1542. DOI: https://doi.org/10.3390/su14031542
- Deng, Z.; Shi, Y.; Han, Q.; et al. A conflict duration graph-based coordination method for connected and automated vehicles at signal-free intersections. Applied Sciences 2020, 10(18), 6223. DOI: https://doi.org/10.3390/app10186223
- Yu, J.; Jiang, F.; Luo, Y.; et al. Networked predictive control method of multi-vehicle cooperative control at communication-constrained unsignalized multi-intersection. IET Intelligent Transport Systems 2023, 17(5), 929–942. DOI: https://doi.org/10.1049/itr2.12317
- Li, N.; Yao, Y.; Kolmanovsky, I.; et al. Game-theoretic modeling of multi-vehicle interactions at uncontrolled intersections. IEEE Transactions on Intelligent Transportation Systems 2020, 23(2), 1428–1442. DOI: https://doi.org/10.1109/TITS.2020.3026160
- Cai, M.; Xu, Q.; Chen, C.; et al. Multi-lane unsignalized intersection cooperation with flexible lane direction based on multi-vehicle formation control. IEEE Transactions on Vehicular Technology 2022, 71(6), 5787–5798. DOI: https://doi.org/10.1109/TVT.2022.3161274
- Cheng, Y.; Zhao, Y.; Zhang, R.; et al. Conflict resolution model of automated vehicles based on multi-vehicle cooperative optimization at intersections. Sustainability 2022, 14(7), 3838. DOI: https://doi.org/10.3390/su14073838
- Ge, Q.; Sartoretti, G.; Duan, J.; et al. Distributed Model Predictive Control of Connected Multi-Vehicle Systems at Unsignalized Intersections. In 2022 IEEE International Conference on Unmanned Systems (ICUS). IEEE: Piscataway, NJ, USA, 2022, pp. 1466–1472. DOI: https://doi.org/10.1109/ICUS55513.2022.9986954
- Wang, W.; Song, Y.; Zhang, J.; et al. Automatic parking of vehicles: A review of literatures. International Journal of Automotive Technology 2014, 15, 967–978. DOI: https://doi.org/10.1007/s12239-014-0102-y
- Yamazaki, A.; Izumi, Y.; Yamane, K.; et al. Development of control technology for controlling automated valet parking. Denso Ten Technical Review 2019, 3, 18–23.
- Kessler, T.; Knoll, A. Multi vehicle trajectory coordination for automated parking. In 2017 IEEE Intelligent Vehicles Symposium (IV). IEEE: Piscataway, NJ, USA, 2017, pp. 661–666. DOI: https://doi.org/10.1109/IVS.2017.7995793
- Wu, B.; Qian, L.; Lu, M.; et al. Optimal control problem of multi-vehicle cooperative autonomous parking trajectory planning in a connected vehicle environment. IET Intelligent Transport Systems 2019, 13(11), 1677–1685. DOI: https://doi.org/10.1049/iet-its.2019.0119
- Li, B.; Zhang, Y.; Shao, Z.; et al. Simultaneous versus joint computing: A case study of multi-vehicle parking motion planning. Journal of Computational Science 2017, 20, 30–40. DOI: https://doi.org/10.1016/j.jocs.2017.03.015
- Mrazovic, P.; Eser, E.; Ferhatosmanoglu, H.; et al. Multi-vehicle route planning for efficient urban freight transport. In 2018 International Conference on Intelligent Systems (IS). IEEE: Piscataway, NJ, USA, 2018, pp. 744–753. DOI: https://doi.org/10.1109/IS.2018.8710538
- Kneissl, M.; vom Dorff, S.; Molin, A.; et al. Mixed-reality testing of multi-vehicle coordination in an automated valet parking environment. IFAC-PapersOnLine 2020, 53(2), 17564–17571. DOI: https://doi.org/10.1016/j.ifacol.2020.12.2669
- Alipour-Fanid, A.; Dabaghchian, M.; Zeng, K. Impact of jamming attacks on vehicular cooperative adaptive cruise control systems. IEEE Transactions on Vehicular Technology 2020, 69(11), 12679–12693. DOI: https://doi.org/10.1109/TVT.2020.3030251
- Du, L.; Chen, L.; Hou, X.; et al. Cooperative vehicle localization base on extended Kalman filter in intelligent transportation system. In 2019 28th Wireless and Optical Communications Conference (WOCC). IEEE: Piscataway, NJ, USA, 2019, pp. 1–5. DOI: https://doi.org/10.1109/WOCC.2019.8770586
- Zhang, S.; Lu, C.; Jiang, S.; et al. An unmanned intelligent transportation scheduling system for open-pit mine vehicles based on 5G and big data. IEEE Access 2020, 8, 135524–135539. DOI: https://doi.org/10.1109/ACCESS.2020.3011109
- Yang, M.; Wei, S.; Jiang, R.; et al. Single-message-based cooperative authentication scheme for intelligent transportation systems. Computers & Electrical Engineering 2021, 96, 107390. DOI: https://doi.org/10.1016/j.compeleceng.2021.107390
- Wu, S.; Wang, H.; Yu, W.; et al. A new SOTIF scenario hierarchy and its critical test case generation based on potential risk assessment. In 2021 IEEE 1st International Conference on Digital Twins and Parallel Intelligence (DTPI). IEEE: Piscataway, NJ, USA, 2021, pp. 399–409. DOI: https://doi.org/10.1109/DTPI52967.2021.9540200
- Zhou, R.; Liu, Y.; Zhang, K.; et al. Genetic algorithm-based challenging scenarios generation for autonomous vehicle testing. IEEE Journal of Radio Frequency Identification 2022, 6, 928–933. DOI: https://doi.org/10.1109/JRFID.2022.3223092


