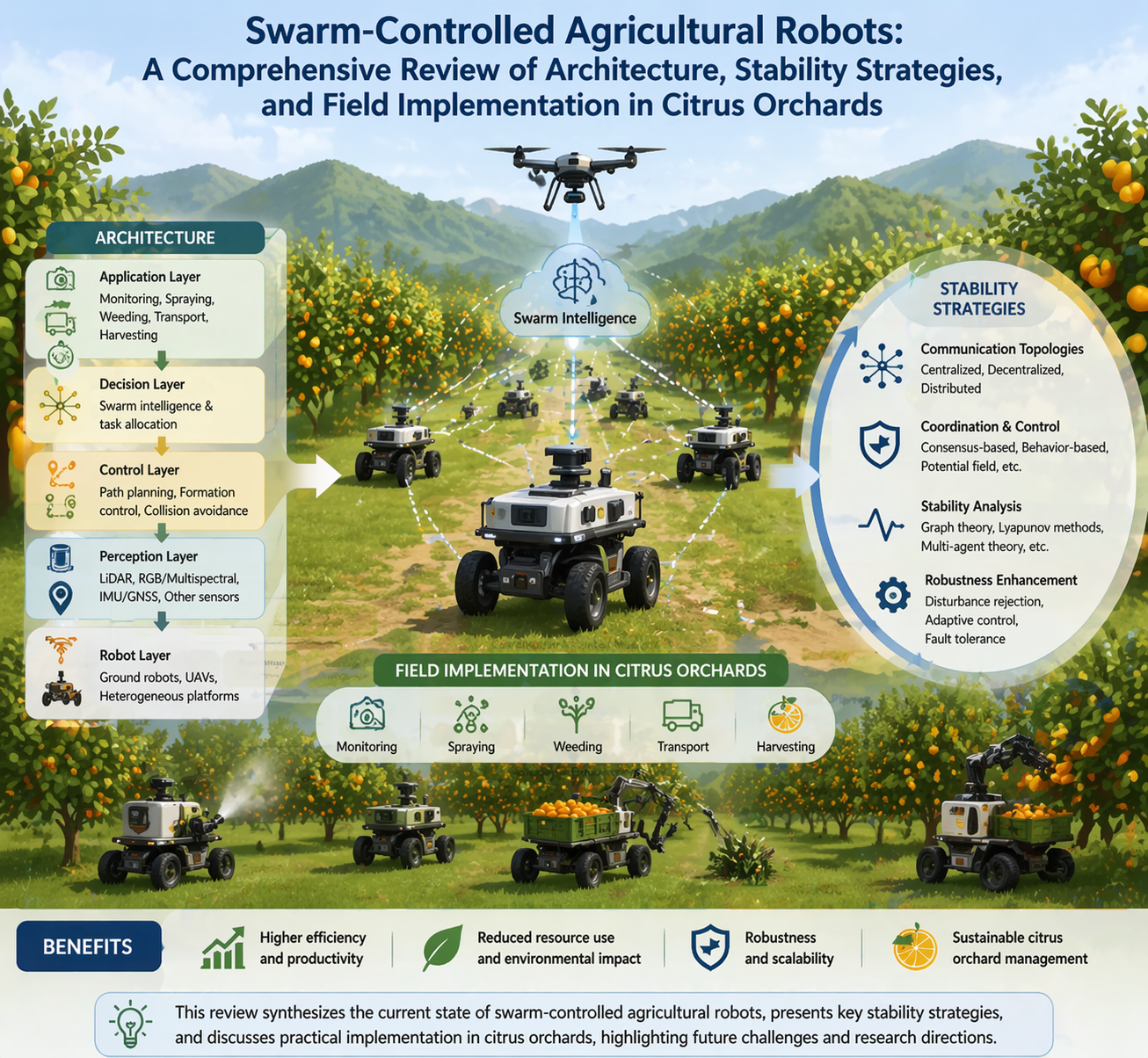
The rapid expansion of agricultural robotics is increasingly constrained by complex field environments, operational variability, and the growing demand for coordinated multi-robot tasks, rendering traditional single-robot systems insufficient for modern agricultural production. Although swarm control has emerged as a promising solution, existing studies lack a systematic framework that integrates coordination architecture, agricultural scenario adaptation, and field-level validation. This paper analyzes and highlights the importance of Swarm-Controlled Agricultural Robots (SCAR), and summarizes current research hotspots regarding the integration of SCAR with agriculture. Secondly, we present a structured framework for Swarm-Controlled Agricultural Robots based on three core dimensions: swarm coordination architecture, crop-oriented task adaptation, and environmental robustness design. The proposed model integrates centralized–distributed hybrid control, task-specific parameter optimization, and anti-interference mechanisms tailored to complex orchard environments. Based on this framework, representative application paradigms in precision planting, collaborative harvesting, and intelligent management are analyzed, and stability enhancement strategies are proposed from hardware, algorithmic, and communication perspectives. Long-term field validation conducted in citrus orchards from 2021 to 2025 demonstrates that the proposed framework improves operational efficiency by 45%, achieves positioning accuracy within one centimeter, and significantly enhances environmental adaptability compared with conventional single-robot systems. This research provides a practical foundation for large-scale deployment of agricultural multi-agent systems.
- Open Access
- Review
Swarm-Controlled Agricultural Robots: A Comprehensive Review of Architecture, Stability Strategies, and Field Implementation in Citrus Orchards
- Wei Ma 1,*,
- Yuepeng Song 2,
- Yongqiang Zheng 3,
- Zhiwei Tian 1
Author Information
Received: 16 Jan 2026 | Revised: 03 Mar 2026 | Accepted: 16 Mar 2026 | Published: 27 Mar 2026
Abstract
Graphical Abstract
Keywords
group control | citrus orchard | agricultural robot | crop management | precision agriculture | deep learning
References
- 1.
Anastasiou, E.; Ntakos, G.; Kanakari, E.; et al. Applications of Robotics and Extended Reality in Agriculture: A Review. Smart Agric. Technol. 2025, 12, 101521. https://doi.org/10.1016/j.atech.2025.101521.
- 2.
Wang, Y.; Shao, M.; Wang, J.; et al. SMICGS: A Novel Snapshot Multispectral Imaging Sensor for Quantitative Monitoring of Crop Growth. Plant Phenomics 2025, 7, 100056. https://doi.org/10.1016/j.plaphe.2025.100056.
- 3.
Oz, N.; Sochen, N.; Mendlovic, D.; et al. End-to-End Pipeline for Simultaneous Temperature Estimation and Super Resolution of Low-Cost Uncooled Infrared Camera Frames for Precision Agriculture Applications. Comput. Electron. Agric. 2025, 238, 110765. https://doi.org/10.1016/j.compag.2025.110765.
- 4.
Shkola, V.; Alsalami, Z.; Mohammed, G.; et al. Enhancing Crop Yield Prediction Using IoT-Based Soil Moisture and Nutrient Sensors. SHS Web Conf. 2025, 216, 01029. https://doi.org/10.1051/shsconf/202521601029.
- 5.
Sun, H.; Liu, T.; Wang, J.; et al. Evaluation of Two Deep Learning—Based Approaches for Detecting Weeds Growing in Cabbage. Pest Manag. Sci. 2024, 80, 2817–2826. https://doi.org/10.1002/ps.7990.
- 6.
Zhao, X.; Zhang, J.; Huang, Y.; et al. Detection and Discrimination of Disease and Insect Stress of Tea Plants Using Hyperspectral Imaging Combined with Wavelet Analysis. Comput. Electron. Agric. 2022, 193, 106717. https://doi.org/10.1016/j.compag.2022.106717.
- 7.
Mallik, S.; Chakraborty, A.; Podder, K.; et al. Enhancing Soil Moisture Prediction with Explainable AI: Integrating IoT and Multi-Sensor Remote Sensing Data through Soft Computing. Appl. Soft Comput. 2025, 180, 113406. https://doi.org/10.1016/j.asoc.2025.113406.
- 8.
Feng, L.; Xu, C.; Tang, H.; et al. Application of Navigation Technology in Agricultural Machinery: A Review and Prospects. Artif. Intell. Agric. 2026, 16, 94–123. https://doi.org/10.1016/j.aiia.2025.10.003.
- 9.
He, Z.; Ma, L.; Wang, Y.; et al. Double-Arm Cooperation and Implementing for Harvesting Kiwifruit. Agriculture 2022, 12, 1763. https://doi.org/10.3390/agriculture12111763.
- 10.
Otani, T.; Itoh, A.; Mizukami, H.; et al. Agricultural Robot under Solar Panels for Sowing, Pruning, and Harvesting in a Synecoculture Environment. Agriculture 2022, 13, 18. https://doi.org/10.3390/agriculture13010018.
- 11.
Kanagasingham, S.; Ekpanyapong, M.; Chaihan, R. Integrating Machine Vision-Based Row Guidance with GPS and Compass-Based Routing to Achieve Autonomous Navigation for a Rice Field Weeding Robot. Precis. Agric. 2019, 21, 831–855. https://doi.org/10.1007/s11119-019-09697-z.
- 12.
van Essen, R.; Harel, B.; Kootstra, G.; et al. Dynamic Viewpoint Selection for Sweet Pepper Maturity Classification Using Online Economic Decisions. Appl. Sci. 2022, 12, 4414. https://doi.org/10.3390/app12094414.
- 13.
Miao, Z.; Guo, H.; Xu, Z.; et al. Swarm Intelligence in Agricultural Robotics: Key Technologies and Future Prospects. Trans. Chin. Soc. Agric. Eng. 2025, 41, 1–17. https://doi.org/10.11975/j.issn.1002-6819.202510194.
- 14.
Li, Y.; Huang, J.; Liu, C.; et al. Fast and Robust Cooperative Control of Multiple UAVs Based on Particle Swarm Optimization. Aerosp. Control 2025, 43, 32–38.
- 15.
Seo, S.; Lee, K. Density-Driven Multidrone Coordination for Efficient Farm Coverage and Management in Smart Agriculture. IEEE Trans. Control Syst. Technol. 2025, 34, 711–724.
- 16.
Tang, R.; Tang, J.; Talip, M.S.A.; et al. Enhanced Multi Agent Coordination Algorithm for Drone Swarm Patrolling in Durian Orchards. Sci. Rep. 2025, 15, 9139.
- 17.
Zhou, R.; Sun, W.; Liu, K.; et al. Study on Detection of Missing Sowing and Replanting of Potato Sowing Device Based on Improved YOLOv8n. Smart Agric. Technol. 2025, 12, 101671. https://doi.org/10.1016/j.atech.2025.101671.
- 18.
Zhang, Y.; Xie, H.; Zhang, D.; et al. Design and Experimental Study of Ridge-Grown Strawberry Automatic Harvesting Robot. Comput. Electron. Agric. 2026, 240, 111112. https://doi.org/10.1016/j.compag.2025.111112.
- 19.
Xu, Y.; Han, Y.; Sun, Z.; et al. Path Planning Optimization with Multiple Pesticide and Power Loading Bases Using Several Unmanned Aerial Systems on Segmented Agricultural Fields. IEEE Trans. Syst. Man Cybern. Syst. 2023, 53, 1882–1894. https://doi.org/10.1109/tsmc.2022.3205695.
- 20.
Al-Amin, A.K.M.A.; Lowenberg-DeBoer, J.; Franklin, K.; et al. Autonomous Regenerative Agriculture: Swarm Robotics to Change Farm Economics. Smart Agric. Technol. 2025, 11, 101005. https://doi.org/10.1016/j.atech.2025.101005.
- 21.
Klaina, H.; Guembe, I.P.; Lopez-Iturri, P.; et al. Analysis of Low Power Wide Area Network Wireless Technologies in Smart Agriculture for Large-Scale Farm Monitoring and Tractor Communications. Measurement 2022, 187, 110231. https://doi.org/10.1016/j.measurement.2021.110231.
- 22.
Chen, C.; Song, Z.; Li, X.; et al. Research Status of Apple Picking Robotic Arm Picking Strategy and End-Effector. Comput. Electron. Agric. 2025, 235, 110349. https://doi.org/10.1016/j.compag.2025.110349.
- 23.
Haghighi, R.; Cheah, C.C. Multi-Group Coordination Control for Robot Swarms. Automatica 2012, 48, 2526–2534. https://doi.org/10.1016/j.automatica.2012.03.028.
- 24.
Morales, A.; Guerra, R.; Horstrand, P.; et al. A Multispectral Camera Development: From the Prototype Assembly until Its Use in a UAV System. Sensors 2020, 20, 6129. https://doi.org/10.3390/s20216129.
- 25.
Zavvari, E.; Badri, P.; Sojoodi, M. Consensus of a Class of Nonlinear Fractional-Order Multi-Agent Systems via Dynamic Output Feedback Controller. Trans. Inst. Meas. Control 2022, 44, 1228–1246. https://doi.org/10.1177/01423312211049936.
- 26.
Ding, C.; Zheng, Z. Multi-Agent Collaborative Operation Planning via Cross-Domain Transfer Learning. Knowl. Based Syst. 2025, 314, 113172. https://doi.org/10.1016/j.knosys.2025.113172.
- 27.
Sakthipriya, S.; Naresh, R. Precision Agriculture Based on Convolutional Neural Network in Rice Production Nutrient Management Using Machine Learning Genetic Algorithm. Eng. Appl. Artif. Intell. 2024, 130, 107682. https://doi.org/10.1016/j.engappai.2023.107682.
- 28.
Ahmad, J.; Wahab, M.N.A.; Ramli, A.; et al. Enhancing Performance of Global Path Planning for Mobile Robot through Alpha–Beta Guided Particle Swarm Optimization (ABGPSO) Algorithm. Measurement 2026, 257, 118633. https://doi.org/10.1016/j.measurement.2025.118633.
- 29.
Wang, S.; Wang, Y.; Sun, Z. Autonomous Navigation and Visual Navigation in Robot Mission Execution. Image Vis. Comput. 2025, 158, 105516. https://doi.org/10.1016/j.imavis.2025.105516.
- 30.
Sun, G.; Guo, J.; Wu, H.; et al. Cluster Routing Algorithm of 4G Wireless Communication AD Hoc Network Based on LoRa Transmission Technology. Pervasive Mob. Comput. 2026, 115, 102128. https://doi.org/10.1016/j.pmcj.2025.102128.
- 31.
Guo, P.; Zhao, Z.; Zhang, Y.; et al. Adaptive Access Strategy for Satellite-Terrestrial Optical Networks Based on Particle Swarm Optimization Algorithm. Phys. Commun. 2025, 69, 102600. https://doi.org/10.1016/j.phycom.2025.102600.

This work is licensed under a Creative Commons Attribution 4.0 International License.
 Suite 4002 Level 4, 447 Collins Street, Melbourne, Victoria 3000, Australia
Suite 4002 Level 4, 447 Collins Street, Melbourne, Victoria 3000, Australia General Inquiries: info@sciltp.com
General Inquiries: info@sciltp.com