
Downloads
Download



This work is licensed under a Creative Commons Attribution 4.0 International License.
Review
Deformable Morphing and Multivariable Stiffness in the Evolutionary Robotics
Huijuan Feng , Yahui Xue , Honggeng Li , Zhao Tang , Wenjin Wang , Zhenhua Wei , Guosong Zeng , Mingwu Li , and Jian S. Dai *
Shenzhen Key Laboratory of Intelligent Robotics and Flexible Manufacturing Systems, Institute for Robotics, Southern University of Science and Technology, Shenzhen 518055, China
* Correspondence: daijs@sustech.edu.cn
Received: 8 October 2023
Accepted: 20 October 2023
Published: 24 October 2023
Abstract: This paper is to review and discuss the current state-of-the-art and future direction of the evolutionary robotics in its deformable morphing and multivariable stiffness. Structural morphing and shape morphing are the center piece of the deformable morphing and lead to the study of both reversible and irreversible deformabilities in morphing that form a basis for future evolutionary robotics. Having thoroughly reviewed the techniques, this paper reviews the science and technology in multivariable stiffness for evolutionary robotics particularly for reconfigurable evolutionary robots and their various applications. This leads to a review of dynamics with the model order reduction, and leads to a review of actuation strategy of metamorphic mechanisms that is a core of the structure of the evolutionary robotics. As such, the paper further reviews camera-based evolutionary robots with intelligent sensing, intelligent controlling and health monitoring, and then the real-time control of high-dimensional robots which cast light on tackling the evolutionary robot control, with the fault monitoring and maintenance. The paper in general presents the future prospects for the evolutionary robots in their deformable morphing and multivariable stiffness with the control of high-dimensional robots and their applications in intelligent infrastructure construction and maintenance.
Keywords:
morphing metamorphic mechanisms reconfigurability deformability stiffness evolutionary robotics1. Introduction
The evolutionary robotics is one of the future directions [1] indicated by the Institution of Electrical and Electronics Engineers (IEEE). This originates from biological evolution. Biological evolution is the process of interaction, self-reconstruction, and reformation of the environment by natural selection. Evolutionary robotics draws inspiration from biology, aiming to create more robust and adaptive robots by applying the selection, variation, and heredity principles of natural evolution to the design of robots with embodied intelligence [2]. The proposal of evolutionary robotics dates back to 1993 when Harvey [3] studied the species adaptation genetic algorithm in the case of hill crawling and tournament selection. The field of evolutionary robotics has evolved in four areas including evolutionary structure, evolutionary design, evolutionary morphology and evolutionary control [4].
Though most evolutionary robotics is focusing on the evolutionary algorithms and evolutionary computation, Dai [5] in 1998 proposed an evolution in robot structures that are a center piece in evolutionary robotics. The proposed metamorphic mechanisms originated from origami folds have topology change and mobility change with all morphing possibilities. This raised a revolution in robot structures in contrast to fixed topology and fixed structures. With the proposal of this novel class of mechanisms and its design methodology, multiple structures of robots are developed. A summary of variable morphing theory and techniques was presented by Aimedee et al. [6]. The development in evolutionary robotics led to a series of IEEE International Conference on Reconfigurable Mechanisms and Robots (ReMAR) that presents a platform for discussing and developing new robotic structures. In all the waves of structural developments of evolutionary robots, the metamorphic robot hand [7] was developed at King’s College London, the origami wheeled robot [8] was developed at KAIST, the origami-inspired self-folding crawling robot [9] was developed at Harvard, the tethered miniature origami robot [10] was developed at MIT, the modular origami robot: Mori [11] was developed at EPFL, the origami-based three-finger manipulator [12] was developed at Case Western Reserve University and the metamorphic walking robots were developed at Tianjin University [13] and Southern University of Science and Technology [14].
The rigidity of those evolutionary robots needs to be updated with the softness [15] and deformability in order to tackle difficulty situations where reconfigurability [16] needs a various kind of deformability. In addition, the fault monitoring and maintenance of the evolutionary robots garner great attention lately, due to the significant demand of accuracy and lifespan of service. Tribology has been widely used for these purposes, for instance, in industrial robot joint, climbing robot, as well as other applications such as grasping and manipulation. Deploying tribology and on-line fault monitoring in evolutionary robotics notably guarantee the accurate order execution (moving and positioning) as well as the cost of maintenance, which further accelerate the development of this field.
This paper reviews the technology in morphing and stiffness variation in relevant fields and discusses their prospect in use for the evolutionary robots. As such, the paper proposes a new actuation strategy and reviews the camera-based technique of evolutionary robots and real-time control of high-dimensional robots. With these new developments, the paper reviews the fault monitoring and running maintenance of evolutionary robots and finally discusses its applications for intelligent infrastructure construction and maintenance in the architectural engineering and construction industry.
2. Structural Morphing with Variable Topology
Regarding evolutionary robotics design, selecting a specific morphology for a given set of tasks is the focus of the research. Chocron and Bidaud [17] proposed a two-level Genetic Algorithm (GA) for the task-based design of 3D modular manipulators in 1997. Chung et al. [18] determined the link length of a task-based modular manipulator through GA after determining the necessary configuration in 1997. Inspired by nature, Dai and Jones [5] proposed the concept of metamorphic mechanisms in 1999, which opened up a new paradigm for robotic design with structural morphing. Various work has been conducted on the type synthesis of metamorphic mechanisms [19‒21] and the reconfigurability in automobiles in the structure, manufacturing and algorithm has been thoroughly discussed recently [22]. Funes and Pollack [23,24] used GA to evolve different 2D/3D morphologies using LEGO in 1998. Hornby et al. [25,26] used generative encoding for evolving physical modular, 2D locomotive robots in 2001. Dai and Wang [27,28] designed a multi-fingered robotic hand with a metamorphic palm in 2006, of which the palm morphs structures with variable topology, increasing the dexterity and applicability. The metamorphic hand has evolved into several generations with its kinematics, workspace, and manipulability well studied [7,29‒40]. Zykov et al. [41] demonstrated robots capable of autonomous self-reproduction in 2007. Zhang et al. [42] proposed the biological modeling and evolution-based synthesis by constraints analysis in 2008. Rout and Mittal [43] used differential evolutionary optimization for 2-DoF RR planar and 4-DoF SCARA manipulators in 2010. Bongard [44] in 2011 evolved the morphology of robots in the form of legs and in later stage algorithm developed gait for the legs finally evolved. Rubrecht et al. [45] evolved a manipulator working in a highly constrained workspace for the maintenance of tunnel boring machines in hostile conditions using GA in 2011. Tolley et al. [46] presented an automated approach to stochastic modular robotics that can evolve a structure and assembly plan to achieve a target function in 2011. More attention has been paid to the evolutionary designs of autonomous robots working in cluttered environments. Dai et al. proposed the metamorphic quadruped robot with a morphing wrist in 2012, which can adapt to various surfaces, execute changeable gaits on multiple terrains, and conquer challenging obstacles [47‒53]. The metamorphic walker has evolved into Origaker with multi-mimicry able to transform between different working modes such as the reptile-, arthropod-, and mammal-like modes, without disassembly and reassembly based on a single-loop spatial metamorphic mechanism in 2022 [14]. This led to all origami-based structures [54‒56]. Chen et al. [57] proposed a methodology for the rapid hardware synthesis of embedded real-time complex systems in 2013. Howard et al. [58] proposed ‘multi-level evolution’, a bottom-up automatic process that designs robots across multiple levels and niches them to tasks and environmental conditions in 2019.
A few studies have been conducted on the evolution of robot prototypes along with the structural design. Lipson and Pollack [59] proposed an evolutionary approach for designing articulated bodies and fabricated the physical model using a 3D printing machine to compare the simulation results to the physical model in 2000. Rieffel and Sayles [60] in 2010, and Kuehn [61] in 2012 developed a machine named EvoFab—a fully embodied evolutionary fabrication that can automatically invent and build anything from soft robots to new toys by evolving the process. Wei et al. [62] conducted the kinematic analysis and fabricated the evolved prototype of a metamorphic anthropomorphic hand with a reconfigurable palm in 2011. Eiben et al. [63] proposed a novel concept of the evolution of things instead of the evolution of code in 2012. Further investigations should be conducted to analyze the applicability of the proposed concepts for realistic works. Wang et al. [64] reported a systematic set of model-based evolutionary design, fabrication, and experimental validation of magnetic soft continuum robots with a counterintuitive nonuniform distribution of magnetic particles to achieve an unprecedented workspace in 2021. Recently, Wang et al. [65] presented a fully realized adaptive resource landscape with diploid three-gene robots presenting interacting roles of population dynamics, mutations, breeding, death, and birth. Eiben et al. [66‒68] and Husbands et al. [69] outlined a perspective on the future of evolutionary robotics and discussed a long-term vision regarding robots that evolve in the real world in 2021.
Besides the evolution in robotic design and prototyping, the field of co-evolution of morphology and control has received several contributions. Sims [70,71] pioneered the concept of combining both morphology and control using an evolutionary approach in 1994. Lee et al. [72] combined morphology and control for features like walking, jumping, swimming, and following using evolving algorithm in 1996. Lund et al. [73] included the robot body plan in the genotype and co-evolved the task-fulfilling behaviour and body plan using GA in 1997. Chocron and Bidaud [74,75] used GA to integrate dynamic simulation of a global robotic system for locomotion in its environment for various tasks in 1999. Lipson and Pollack [59] evolved the articulated robots inspired by biological life forms in 2000. The robots evolved from vertices, bars, neurons, and actuators by the use of evolutionary strategies. Pollack et al. [76,77] used GA for the evolution and construction of electromechanical systems in 2000. Paul and Bongard [78] used GA and neural networks (NN) to achieve stable bipedal locomotion using coupled evolution of morphology and control on a 5-link biped robot in 2001. Hornby et al. [79,80] used a system for generatively creating both creature morphology and neural controller in 2001. Pollack et al. [81] presented a review on LegoBot GOLEM and Tinkerbots in 2001. Stanley and Miikkulainen [82] conducted a competitive coevolution of robot neural controllers and the location of sensors and motors through Neuro Evolution of Augmenting Topologies (NEAT) in 2002. Chocron et al. [83] developed a global design approach for self-reconfigurable locomotion systems based on evaluation by dynamic simulation and optimization by artificial evolution in 2005. Aminzadeh et al. [84] evolved a friction compensation and control strategy for the dexterous robotic hand in 2012. Lipson [85] in 2005, Bongard [86] in 2013 and Nolfi et al. [87] in 2016 presented a review of work done in the field of evolutionary robotics, respectively. However, there is not much connectivity in the existing work on robot morphology and control. Researchers have either investigated the applicability of evolutionary approaches for gait development or motion planning or the work has been presented from algorithmic perspectives. Future work should be focused on coevolving several kinds of mechanisms with various levels of complexity in their controllers.
Except for the structural morphing with variable topology, some evolutionary robots are morphable due to the reconfigurable materials. Common reconfigurable materials are polymers and their composites, which are suitable for various manufacturing technologies. These materials can not only be formed using traditional hot pressing and injection molding processes, but also form complex structures through advanced 3D printing technology. It is worth noting that precursors with (methyl) acrylate groups are suitable for various printing technologies, including Fused Deposit Modeling, direct ink writing, and digital light processing. Both experimental and modeling methods can be used to understand the change mechanisms of reconfigurable materials, including shrinkage, expansion, magnetic force, thermal expansion, phase transformation, and plastic deformation. These basic understandings greatly expand the design space of reconfigurable materials, with programmable deformations (shape memory materials) or infinite plastic deformations (vitrimers) to meet the needs of fast, large, freely constrained, reversible, and on-demand deformation. The development of advanced manufacturing technology and reconfigurable material deformation mechanisms will create new types of reconfigurable robots with unprecedented functions.
3. Shape Morphing in Evolutionary Robots with Material Deformation
Biological organisms leverage a remarkable control of their shapes and functions to adapt to the environment. Evolutionary robots with shape morphing capabilities are highly desired to mimic the behaviors of animals to perform corresponding functionalities [88‒90]. Smart materials including polymers and nanomaterials that respond to external stimuli (such as electricity, heat, light, chemicals, magnetic field, fluidic pressure, etc.) have been widely used as actuators for shape morphing robots [91]. Electrically driven actuation is one of the most common methods, which has the advantages of easy integration, straightforward design, precise control, etc. Depending on the material selection and structure design, electrically driven shape morphing can be achieved by electrothermal, dielectric elastomer, electrochemical, and electrohydrodynamic actuators, and so on [92].
Electrothermal actuation usually relies on the Joule heating of electrically resistive materials to induce structure expansion and contraction. Shape memory alloys [93] and polymers [94] are usually integrated as structure components to achieve morphology transition by taking advantage of the temperature memory effect. However, shape memory materials often have the disadvantages of slow heating and cooling responses, which limit their applications in situations requesting fast response. Twisted fibers and yarns have been proposed to improve the response speed and stroke strength by generating tortional rotations [95,96].
Dielectric elastomer actuation generates structure deformation or motion by applying an electrical stimulus. Two flexible electrodes can be embedded between the elastomer sheet, and multiaxial actuation can be readily achieved by a 3D printing technique [97]. A rigid framework is usually required to improve the actuation force and strain [98]. Otherwise, the actuation energy density is rather limited. Multilayer integration is one potential strategy to improve the overall performance [99]. Alternatively, elastomers with anisotropic elasticity like liquid crystal elastomers with preprogrammed molecular alignment can achieve both high actuation strain and strain rate [100,101]. The application of dielectric elastomer actuators is often combined with shape change polymers. The former is used to apply the shape morphing actuation and the latter is used to lock the shape to realize an automatic and reversible shape morphing process [102,103]. However, dielectric elastomer actuation usually requires quite large applied electric voltage (over 1 kV), and the potential risk of dielectric breakdown at elastomer defects hinds their wide application.
Electrochemical actuation takes advantage of charge adsorption induced electrocapillary effect to generate shape-morphing ability. Such actuation benefits from ultrahigh specific surface area of the electrodes. Bilayer cantilever beams consisting of one metal layer and one nanoporous metal layer are shown to be able to produce large deformation under a low electric voltage around 1 V [104]. Electrodes with even higher specific surface area can be achieved by using self-assembly of two-dimensional (2D) materials. Reversible ion insertion and extraction into the interlayer space of 2D flakes induces the dynamic expansion and contraction of electrode films. An electrode made from an assembly of MoS2 flakes can lift a mass more than 150 times of its own [105]. However, the using of aqueous electrolyte limits the wide application of electrochemical actuators, especially for deployable evolutionary robots. The replacement of aqueous electrolytes with solid-state ones has been demonstrated to be able to generate similar actuation effect [106], which paves the way for real-world applications of electrochemical actuators in shape-morphing robots.
Electrohydrodynamic actuation is another emerging method that can be applied for shape-morphing evolutionary robots. Fluidic actuation has been widely used in the motion control of griping and locomotion by regulating the fluidic pressure inside the hollow channels of the robot bodies [107]. However, an external bulky pump is generally required, which limits the application in evolutionary robots. Charge-injection electro-hydrodynamics has been utilized to control the bidirectional transport of dielectric liquid encapsulated in elastomeric tubes [108]. The resultant electrohydrodynamic actuators are readily to be integrated into soft structures and show great potential to work as artificial muscles for autonomous evolutionary robotics.
From above, it is seen that electrically actuated shape morphing materials have great potential applications in evolutionary robotics. Different electrical actuation method has its own advantages but also limitations. Novel designing principles as well as new materials are still highly desired to achieve advanced control over the shape and structure manipulation of evolutionary robotics. For example, evolutionary robots should not only change shapes under external stimuli but also lock their shapes so that no continuous energy input is necessary after transformation [89]. The current design usually depends on the shape locking ability of slowly responsive shape memory materials. The emergence of mechanical metamaterials provides both new horizons for the ability of shape morphing control [109‒111] and for the shape locking strategies [112]. It can be expected that the combination of mechanical metamaterials and electrical actuation would enable more freedom for the realization of shape morphing evolutionary robotics.
4. Deformable Morphing in Robot Structure
4.1. Reverse Deformability in Morphing
Reversible deformation materials, are also known as shape memory materials. Common shape memory materials include hydrogel, liquid crystal elastomer and shape memory polymer. Hydrogels and liquid crystal elastomers have poor bearing capacity and weak ability to maintain shape. Shape memory polymers (SMP) complete deformation above the glass transition temperature and cool to room temperature to restore their good load-bearing capacity. Applications based on SMP deformation property have widely emerged in the field of robotics, such as robot deformation grippers, deformation hinges, and deformation driving devices.
Figure 1a (i) depicts the process of reversible shape change through a deformable gripper [113]. Shape memory polymers deform from printed shapes to another shape under external stimuli (in this case, heat), and the shape is temporarily fixed after cooling. When external stimuli reappear, the shape memory polymers automatically recover to the printed shape. As shown in Figure 1a(ii), the closed shape gripper is printed and then programmed into an unfolded shape. During the heating process, it autonomously returns to its closed shape and grabs the object. Figure 1b shows the application of a Joule heating reversible deformation hinge in the folding of satellite solar panels [114]. The wires buried in the hinge can heat the shape memory polymer above the glass transition temperature, making the hinge easy to fold (Figure 1b (i)). The hinge is manufactured through digital light processing 3D printing (Figure 1b (ii)), and the design parameters are easily adjustable to adapt to different deformation needs. Joule heating can quickly heat up and unfold the hinge (Figure 1b (iii)). Recent research by Wang et al. has shown that robot drive structures made of shape memory polymers can be reconstructed to form different shapes to adapt to the robot's workspace (Figure 1c) [115]. As shown in Figure 1c (i), due to the size limitation of the robot's driving structure, the robot cannot pass through narrow channels. The driving structure manufactured using shape memory polymers can be programmed into a temporary compressed state (Figure 1c (ii-iii)), allowing the robot to pass through narrow channels (Figure 1c (iv)). After passing, the driving structure can be restored to its original shape through thermal stimulation, thereby restoring the original driving property of the robot (Figure 1c (ii)).
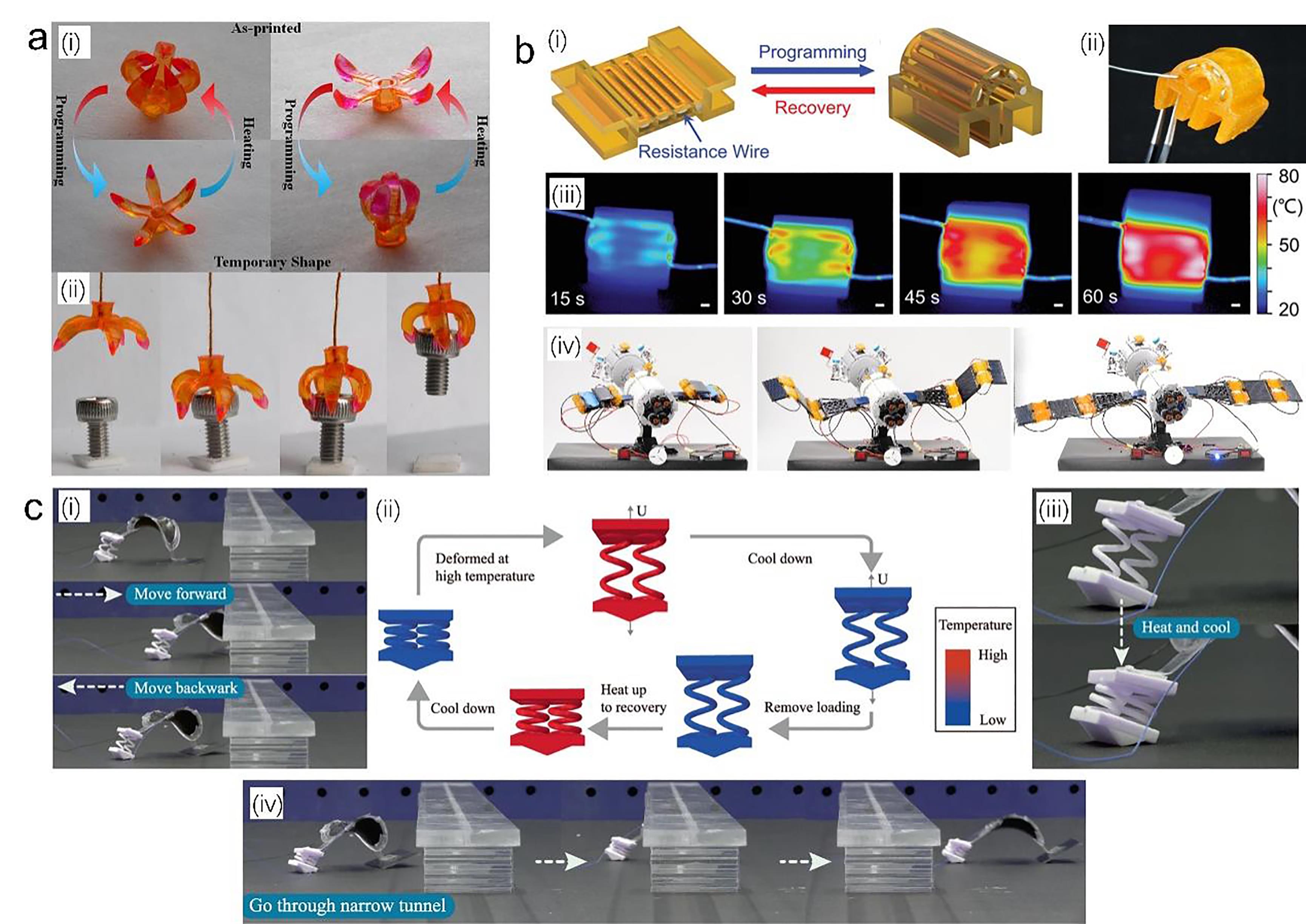
Figure 1. Applications of reversible deformable materials in reconfigurable robots. (a) Reversible deformation grippers [113]. (b) Reversible deformation hinges [114]. (i) Schematic diagram of reversible deformation of shape memory polymer hinges. (ii) Snapshot of the folded hinge. (iii) Infrared snapshots of the folded hinge recovering to its original shape. (c) Reversible deformation robot driving devices [115]. (i) Original shaped robots cannot pass through narrow channels. (ii) Schematic diagram of programming and recovery principles for robot drive structure. (iii) Snapshots of robot drive structure before and after programming. (iv) Snapshot of robot passing through a narrow channel.
4.2. Irreversible Deformability in Morphing
Irreversible deformation materials refer to deformable materials that cannot be restored to its original shape by external stimuli after deformation. Traditional thermoplastics are materials that undergo irreversible deformation, but they cannot be used for shape reconfiguration in robots due to their strong thermal fluidity. Leibler et al. developed a new irreversible deformation material called “Vitrimer” by introducing dynamic covalent chemical bonds into thermosetting networks [116]. The dynamic covalent chemical bonds of Vitrimer can alter the topological structure of molecules, reshaping the thermosetting network while maintaining a constant crosslinking density. The rearrangement, surface proximity, and diffusion of dynamic covalent bonds endow Vitrimer with excellent weldability, self-healing, and reconfigurability. The reconfigurability and weldability of Vitrimer bring new opportunities for robot shape reconfiguration.
Zhao et al. introduced Vitrimer into shape memory polymers (Figure 2a) and developed a new material that combines reversible and irreversible deformation [117]. This new material can be irreversibly deformed into a new shape (pigeon like origami in Figure 2b) at the bond exchange reaction temperature, and reversibly deformed into a temporary new shape (thin plate or aircraft) at the programming temperature (above the glass transition temperature and below the bond exchange reaction temperature), and can autonomously restore to the pigeon shape under thermal stimulation [117]. It is worth noting that this material can undergo multiple irreversible deformations (as shown in Figure 2b where the pigeon undergoes irreversible deformation in the shape of a clover). Introducing Vitrimer into shape memory polymers that can spontaneously form memory cycles can irreversibly reconstruct the sheet into a pigeon shape (Figure 2c) [118]. After activating the material at the wing, the pigeon model can autonomously flap its wings under thermal cycling stimulation. In addition, Vitrimer can also endow shape memory polymer actuators with different permanent initial shapes, enabling the application of an actuator in different operating conditions [119]. The actuator can spontaneously release objects through thermal stimulation before reconfiguration, and can spontaneously grasp objects through thermal stimulation after reconfiguration (Figure 2d).
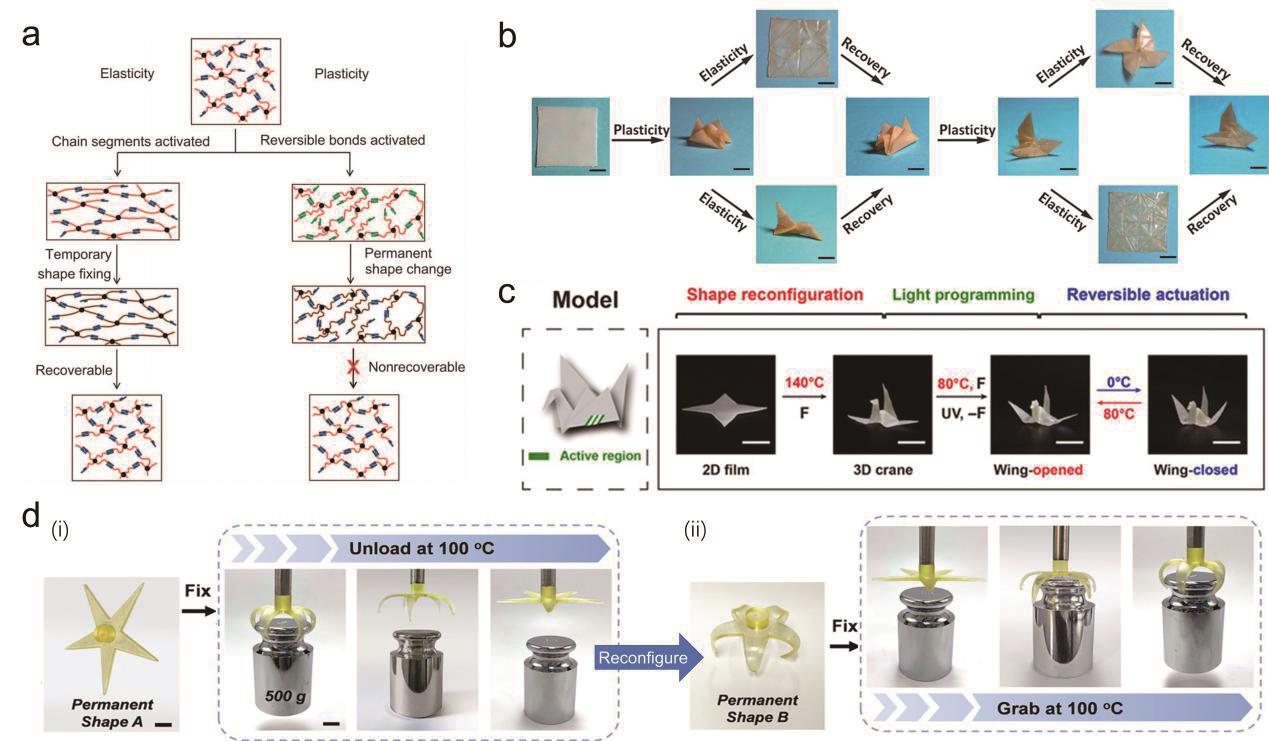
Figure 2. Applications of irreversible deformation materials in reconfigurable robots. (a) Schematic diagram of reversible and irreversible deformation mechanisms of shape memory polymers incorporating dynamic covalent bonds [117]. (b–d) Experimental demonstration of irreversible and reversible deformation. (b) Shape memory polymers that introduce dynamic covalent bonds undergo irreversible deformation into pigeons or clovers and exhibit shape memory effects [117]. (c) The polymer undergoes irreversible deformation into pigeons and has a cyclic shape memory effect under cyclic thermal stimulation [118]. (d) Demonstration of an actuator irreversibly reconfigured into multiple shapes to perform different tasks [119].
5. Multivariable Stiffness in Evolutionary Robotics
Variable stiffness materials transform their resistance to deformation under external stimuli, including low melting point alloys (LMPAs), wax coated materials, electrorheological materials, shape memory polymers, etc.
Wax coated materials and low melting point alloys exhibit rigidity at room temperature, and when the melting point is reached, the material becomes in a liquid state, thereby achieving a variable stiffness effect. Figure 3a shows a variable stiffness beam using wax coated flexible objects [120]. The wax coating near the heating coils was melted, causing the beam to become soft and bent by heavy objects. However, the poor load-bearing capacity and limited deformation times of wax coating materials limit their application in reconfigurable robots.
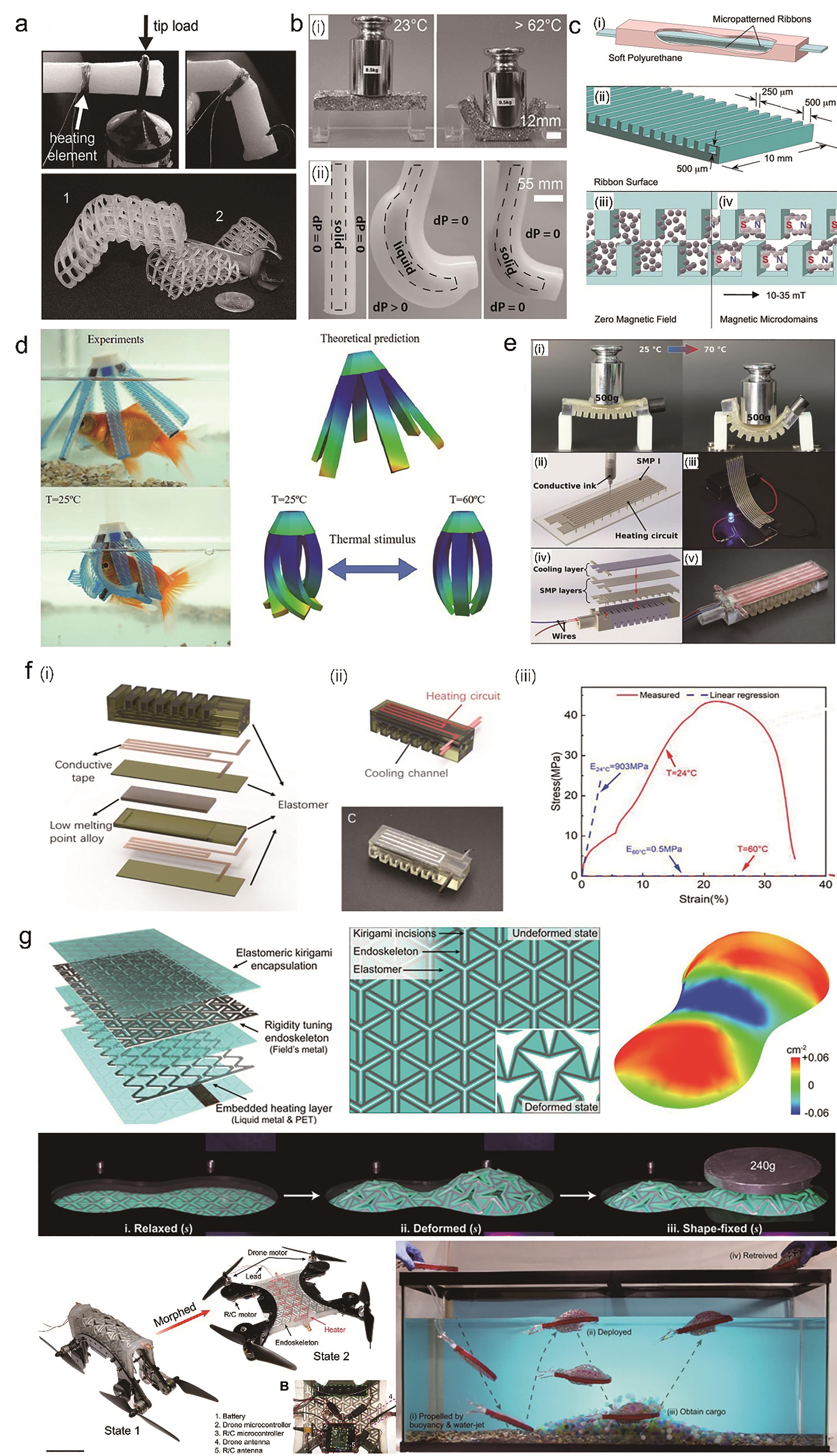
Figure 3. Applications of various variable stiffness materials in reconfigurable robots. (a) (i) Snapshots of wax coating material used as a variable stiffness actuator. (ii) A snapshot of stiffness changes in wax coating structures [120]. (b) (i) A snapshot of stiffness changes in a mixture of low melting point alloys and elastomers. (ii) Snapshots of elastomer airbag actuators coated with LMPA and elastomer composite materials [121]. (c) (i) Schematic diagram of a magnetorheological variable stiffness actuator. (ii) Elastic cavity structure. (iii) Schematic diagram of the effect of magnetic field on actuator stiffness [122]. (d) A shape memory polymer actuator that varies in stiffness and motion trajectory with temperature [123]. (e) A shape memory polymer variable stiffness actuator manufactured through various 3D printing processes [124]. (f) A variable stiffness actuator integrating shape memory polymer cavities and low melting point alloy layer [125]. (g) A variable stiffness material that combines elastic Kirigami with a low melting point alloy for reversible deformation [126].
Shepherd et al. mixed low melting point alloys with elastomers to obtain a variable stiffness composite material that can be reused multiple times (Figure 3b (i)) [121]. This composite material combined with an elastomer airbag has developed into a variable stiffness actuator (Figure 3b (ii)). However, this variable stiffness actuator has defects such as poor mixing performance between polymers and metals, and the inability of elastomers to provide sufficient binding force for liquid metals.
Magnetorheological materials change their properties based on changes in the external magnetic field. Figure 3c shows a variable stiffness elastomer made from magnetorheological materials [122]. When there is no magnetic field, the magnetic fluid in the elastic body is randomly distributed, resulting in a lower stiffness of the elastic body. When an external magnetic field is applied, magnetorheological particles form magnetic domains with each other, thereby increasing the overall stiffness. However, the application of magnetorheological material robots is limited by a stable external magnetic field environment.
As the temperature increases, shape memory materials will transition from a glassy state to a rubbery state, resulting in a significant change in the Young's modulus of the material. Therefore, they can also be used as variable stiffness materials. Wang et al. developed a shape memory polymer variable stiffness robot actuator with a spiral structure. It moves along a spiral grasping path at room temperature (Figure 3d) [123]. Above the glass transition temperature, the actuator stiffness significantly decreases and no longer performs spiral motion, but instead grasps in a straight line. Zhang et al. used various 3D printing techniques to create heating circuits, variable stiffness layers, shape memory polymer cavities, and cooling pipes, and used photocurable materials to bond these components together to form a rapid variable stiffness robot actuator (Figure 3e) [124]. Based on Zhang et al.'s research, Wei et al. printed a variable stiffness actuator coated with a thin layer of low melting point alloy using a mechanically robust shape memory polymer (Figure 3f) [125]. This variable stiffness actuator has ultra-fast variable stiffness capability through built-in circuit heating and built-in microchannel cooling. In addition, the shape memory polymer cavity manufactured by digital light processing has a uniform layer thickness and mechanical robustness, providing stable constraints for liquid metals.
Figure 3g introduces a shape and stiffness deformation material with reversible and fast polymorphic 3D reconfigurability and programmable stiffness [126]. This material combines elastic Kirigami [127,128] nonlinear deformation with low melting point alloy stiffness changes, allowing the flat plate to deform rapidly (<0.1 s) into complex load-bearing shapes and has shape recovery performance through reversible phase transformation. This Kirigami composite material overcomes the trade-off between deformation capacity and load-bearing capacity, and eliminates the power requirement to maintain reconfigured shapes. By integrating with airborne controls, motors, and power supplies, soft robot deformable drones and underwater deformable robots have been created. Drones can automatically convert from ground vehicles to aerial vehicles. Underwater deformable robots can be deployed reversibly to collect goods.
6. Dynamics with the Model Order Reduction
Reconfigurable evolutionary robots with variable stiffness materials typically have flexible or continuum components to achieve desired deformability. These flexible components have a large or even infinite number of degrees-of-freedom (DOF). The robots containing these flexible components are referred to as high-dimensional robots [129,130]. The dynamics of these robots are highly nonlinear because of the large deformation of these flexible components. How to perform efficient yet accurate dynamics modeling of these robots plays an essential role in the fast simulation of these high-dimensional, nonlinear robots. Such a fast numerical simulation will enable the digital twins [131] of evolutionary robots, and then speed up the design, analysis and fabrication of these robots [132,133].
One-dimensional mechanics models such as rods and beams have been widely used in the modeling of flexible structures. These one-dimensional models are obtained by simplifying boundary conditions and nonlinear mapping relations [132]. In the realm of high-dimensional and continuum robots, a slender component is discretized into finite segments of 1D mechanics models. The obtained discrete models enable efficient prediction of the highly nonlinear dynamics of the robots.
Classic 1D mechanics model includes Euler-Bernoulli beam theory and Kirchhoff’s rod theory. As extensions of these classic theories to the realm of continuum robots, piecewise constant curvature (PCC) models have been used in the simulation of flexible links [134], discrete elastic rods (DERs) have emerged and been used to simulate slender rods [135]. In the field of flexible multibody dynamics, geometrically exact beam theory [136] and absolute nodal coordinate formulation [133] have been proven to be effective in simulating flexible components that undergo both ground motion and large deformation.
1D mechanics model tends to make inaccurate prediction on the dynamics of complex structures. 3D modeling frameworks are necessary to achieve precise control and manipulation of complex mechanisms [132]. 3D models are typically constructed using finite element methods (FEM). High fidelity FE models are required to make accurate prediction on the highly nonlinear dynamics of robots, especially the large deformation of flexible components and frictional contact at joint interfaces [137]. However, simulating these high-dimensional mechanics problems is computationally intensive, which is the main bottleneck to achieve real-time simulation of digital twins.
A game changer to fast dynamics simulation of FE-based high-dimensional robots is the technique of model order reduction. The key idea of this technique is to establish a low-dimensional reduced-order model (ROM) of the original high-dimensional full model, yet the low-dimensional ROM still makes accurate prediction. Therefore, the ROM can be used to achieve efficient simulation and real-time control of the high-dimensional robots.
Model order reduction technique can be divided into linear and nonlinear methods. The idea of linear reduction is to project the full state space onto some subspaces. The accuracy of the ROM hence highly depends on the choice of the subspace. Commonly used linear reduction methods include Craig-Bampton [138], proper-orthogonal decomposition (POD) [139], and recently emerged dynamic mode decomposition (DMD) [140] and Koopman operator-based method [141].
The linear reduction methods have inherent limitations when they are applied to nonlinear problems. This is because the linear subspace is not invariant anymore and hence the dimension of the subspace grows rapidly for only a small improvement in accuracy. They also face challenges to capture non-linearizable dynamics [142]. Invariant-manifold-based model reduction can resolve the aforementioned limitations. In particular, spectral manifold (SSM) based model reduction has been successfully applied to the nonlinear analysis of FE models with more than 240,000 DOF [143].
Machine learning (ML) has emerged as an alternative tool to perform model order reduction of high-dimensional robots. Neural networks have been used to learn these high-dimensional dynamics from observed data [144]. Deep learning-based controllers can have numerous applications in high-dimensional robots. For instance, they have been applied to teach underwater soft robots how to swim [145]. These ML approaches, however, typically result in models that rarely preserve the inherent structure of the dynamics. Consequently, the learned models do not generalize well to control tasks which involve trajectories outside the training set. They are also data-intensive and sensitive to noise. To address these issues, dynamics-based ML (DBML) has been proposed [146]. DBML learns models directly from phase space structures and focuses on identifying the dynamics of ubiquitous, low-dimensional attracting invariant manifolds.
7. Actuation Strategy of Metamorphic Mechanisms and Robotics
Multivariable metamorphic mechanisms frequently need to operate under many motion branch configurations in real applications, which is a challenging issue in the use of multivariable metamorphic mechanisms. Constraint singular configurations, also known as bifurcation points, are necessary for the branch evolution of multivariable metamorphic mechanisms. At the mechanism's singularity, a number of complicated circumstances may arise, including growing degrees of freedom, waning stiffness, one-value multiple solutions, etc., which will likely cause the mechanism to switch branches in an unpredictable way. Therefore, one of the main issues limiting the application of multivariable metamorphic mechanisms has always been how to drive the mechanism smoothly to the goal configuration. There aren't many studies that focus on this topic. Most of the time, the configuration transition is accomplished by reducing the motion of the mechanism by adding additional actuators, redundant driving, or locking some joints [147,148].
Through the geometric limit, the rod must coincide or move to the limit position, resulting in the configuration switch being completed in a given configuration. Redundant driving is to artificially reduce its motion by adding an additional drive or locking a joint to achieve controllable requirements. Although the redundant drive maintains the stationarity and dependability of configuration switching, the drive is idle or a complicated control approach is required to coordinate the redundant drive relationship when the metamorphic mechanism is in a non-singular configuration.
Some academics have developed external environment binding to accomplish autonomous configuration switching of reconfigurable metamorphic mechanisms. Based on the equivalent resistance gradient model, a design and configuration switching technique for metamorphic mechanisms was proposed by Li et al. [149]. All of the metamorphic joints that affect how the mechanism moves can produce a specific amount of binding force, which can be turned into an equivalent resistance coefficient that can be compared to one another using predetermined rules. The mechanism will move in accordance with the variables that have the smallest equivalent resistance coefficient, and the remaining variables will remain static, according to the principle of minimum resistance of the mechanism movement.
The aforementioned technique has been used to examine and maintain high-voltage lines, as shown in Figure 4 [150]. The meshing point between the planetary wheel and the traveling wheel gear is always on the vertical line between the driving wheel and the high voltage line while moving normally and without obstructions, as shown in Figure 4a. As illustrated in Figure 4b, when impediments are encountered, the walking wheel stops rotating due to the resistance of the obstacles, while the planetary wheel continues to rotate upward along the inner tooth ring of the walking wheel under the influence of the driving force. When the planetary wheel reaches a particular position, the driving torque of the walking wheel is larger than the resistance moment, allowing it to pass the obstruction and continue moving forward, as shown in Figure 4c.
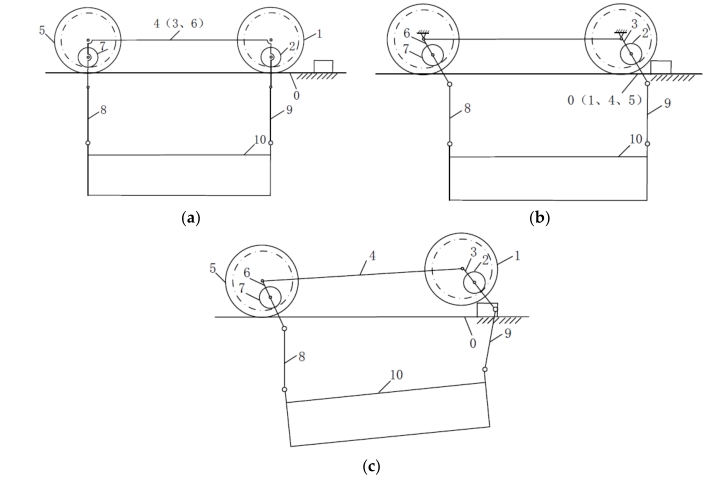
Figure 4. Schematic of configuration transformation during the obstacle-crossing operation for inspecting and maintaining high-voltage lines [150]. (a) Walking process; (b) Climbing process; (c) Obstacle crossing.
However, the equivalent resistance model technique is incompatible with the more general multivariable metamorphic mechanisms. It only functions with the metamorphic mechanism that this technique produces. To solve this problem, several researchers created a kinematic branch switching method based on joint velocity constraints [151]. In order to increase the driving dimension and allow for the switching of kinematic branches without extra drivers (under actuation), joint velocity constraints were added to the standard joint position constraints.
High order kinematic analysis can be used to solve the joint velocity constraints of each motion branch in the bifurcated configuration. The joint velocity constraints of two motion branches are shown as follows for the reconfigurable eight-bar mechanism.

By analyzing the two sets of solutions, it is clear that the difference between them is whether they are equal (or not). As a result, when the mechanism moves to the singular configuration, the control strategy depicted in Figure 5 can be used, and joint 1 and joint 3 (or joint 2 and joint 4) can be chosen as active joints, and the bifurcation movement branch can be controlled by controlling velocity relationship between the two joints. Regulate joint 1 and joint 3 with different joint velocities to move to branch I. Joints 2 and 4 can move at different rates to enter branch II. Finally, it is achieved to switch two motion branches in the singular configuration with three degrees of freedom.
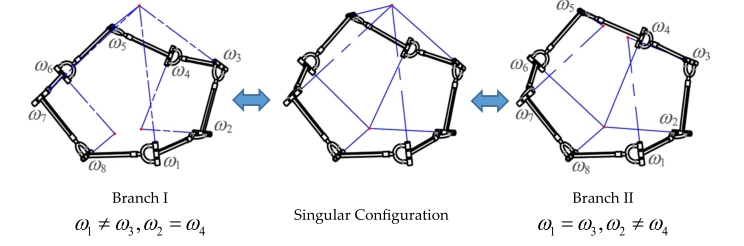
Figure 5. Joint velocity restrictions and motor branch correspondence [151].
Furthermore, in each set of solutions in Equation (1), there are two joint angular velocity relationships, namely the angular velocity relationship between joint 1 and joint 3 and the other one between joint 2 and joint 4. These two angular velocity relations are not independent; if one is satisfied, the other is automatically established. Hence, the two angular velocity relations can be freely chosen, and the appropriate joints are chosen as active joints. Controlling the angular velocity relation of the active joints adds an extra constraint dimension. Using the above reconfigurable eight-bar mechanism as an example, joints 1 and 3 are used as active joints, and joint velocity limitations are introduced. The overall constraint dimension is three, which is equal to the mechanism's mobility in this singular configuration. As a result, the mechanism motion is completely actuated during this moment. In this manner, two active joints are used to pass through a singular configuration with three degrees of freedom.
There are also other disadvantages for velocity-constrained switching control. It is not ideal, for example, for reconfigurable mechanisms, of which all of the bifurcated motion's branches are with one mobility, because there are insufficient drivers to establish an effective velocity relation constraint. Furthermore, because the velocity constraints of all moving branches are the same, this control strategy is pointless to the reconfigurable mechanism addressed in literature [152], in which different motion branches are tangent in the configuration space.
The kinematic branch switching control approach based on joint velocity constraint in configuration space is one of the geometric constraints that does not currently incorporate force. Geometric constraints, conservative constraints, external constraints, and physical restrictions can all be used to achieve the transformation of metamorphic mechanisms. Movement is largely the result of various forces, which are also the cause of the mechanism's movement. As a result, the impact of various forces on the motion of the mechanism should be thoroughly investigated in the subsequent research on configuration evolution and various mechanisms' forces (conservative force, friction force, driving force, etc.) should be taken into account. Establishing a comprehensive set of calculation and analysis criteria, such as the minimum energy criterion, that can be used as the foundation for the design and drive control of the mechanism, and transforming the influence of various forces on the motion of the mechanism into a comprehensive index, are important research directions.
Furthermore, the drive input selection of the conversion between different branches can be conducted by analyzing the robot's bifurcation motion as well as its statics and dynamics models. The transformation node is added to the task planner and motion planner, which decides whether to stay in the current configuration or to enter the neighboring configuration based on the current situation.
Most robots currently employ one of three types of drives: electric, hydraulic, or pneumatic. The operating principle, mode of action, and biological structure are all exceedingly diverse, as is the construction, which severely limits the robot's activity and adaptability. Biological evolution has resulted in significant changes not only in morphology, but also in actuator and actuator-bone spatial arrangement. The absence of bone structure in mollusks, exoskeleton structure in crustaceans, and skeleton-muscle-skin structure in mammals all have an effect on the structural evolution and driving strategy of robots.
Natural systems often match or exceed the performance of robotic systems with deformable bodies. Cephalopods, for example, achieve amazing feats of manipulation and locomotion without a skeleton; even vertebrates like humans achieve dynamic gaits by storing elastic energy in their compliant bones and soft tissues [153]. Several researchers have begun to experiment with different drive systems and flexible materials on robots in order to make them closer to real biology in recent years. Xi et al. presented a complete morphing system consisting of a variable geometry truss manipulator covered by a flexible panel skin [154]. For morphing control, two approaches are investigated: manipulators or flexible panels as drivers. Following that, a robotic fish scale is created with multi-loop linkages to function as a driving skin muscle [155].
Hu et al. demonstrated a magneto-elastic soft millimeter-scale robots that can swim inside and on the surface of liquids, climb liquid menisci, roll and walk on solid surfaces, jump over obstacles, and crawl within narrow tunnels [156]. This robot has a stronger potential for high mobility through multimodal locomotion with more degrees of freedom than its rigid counterpart. Pan et al. created a new soft finger that required no silicone gel and was returned to its previous shape by heating the SMA wire rather than relying solely on heat exchange with the environment [157], which provides a new idea for the lightweight design and convenient design of soft gripper based on SMA. Zhang et al. created functional soft ferromagnetic origami robots with seamlessly integrated structures and a variety of active functions, including robots that mimic flowers with petals bent at various angles and curvatures, low-friction swimming robots, multimode locomotion carriers with gradient-stiffness claws for protecting and delivering objects, and frog-like robots [158]. Zhong et al. demonstrated a class of multifunctional stretchy thermochromic soft actuators based on liquid-vapor phase transitions that may be programmed in terms of initial shape and deformation type [159]. Li et al. created fluid-driven origami-inspired artificial muscles that can be programmed to perform multiaxial motions such as contraction, bending, and torsion [160].
Generally speaking, the majority of novel drive techniques are still in the experimental stage and have a number of drawbacks, including a small drive stroke, a low drive frequency, poor control performance, and so on. However, the development of novel driving techniques, particularly flexible driving (artificial muscles), is inextricably linked to the growth of robots. Animals in the natural world are extremely flexible because their muscles work well. The muscle can be flexibly attached, providing an effective drive, regardless of how intricate the skeletal structure or delicate the actuator may be. The bionic flexible drive, on the other hand, has little effect on the mechanical structure, making it particularly ideal for multi-variable metamorphic mechanisms that demand high adaptability.
8. Camera-Based Evolutionary Robotics
With the development of computer vision, cameras have evolved from a simple photographic sensor to an intelligent sensor for robotics [161]. The capabilities that cameras can bring to the evolutionary robots are twofold, awareness and control [162]. Camera-based awareness helps robots to understand their environment, providing the basis for precise control and task execution.
8.1. Camera-Based Intelligent Sensing for Robots
Cameras provide robots with an "eye" function that enables them to understand and interpret their environment. This process has three different levels of awareness: environment, objects, and activities [162,163]. The environment awareness helps evolutionary robotics to understand the surrounding context, the object awareness promotes the recognition and tracking of a task-specific object, and the activity awareness can facilitate the interaction with human or other robots [164].
The environment awareness equips robots with an intricate comprehension of their surroundings, typically encompassing both scene representation and classification tasks, where the former provides details of sensing and the latter makes the decision [162]. Zhou et al. [165] explored the challenges of scene recognition in computer vision and introduced a large scene-centric database. Based on that, they pointed out the feature differences between object-centered and scene-centered network learning. Zhang et al. [166] proposed a patch-based local-to-global similarity strategy for scene representation to address the challenges of severe appearance changes and viewpoint changes of the camera sensor. The scene classification is to identify the type of scene (e.g., indoor or outdoor), helping the robot to understand their environment [167]. Ye et al. [168] summarized the challenges of visual understanding of indoor scenes for robots, and designed a two-stage scene understanding method based on deep learning, which established the foundation for robots to perform visual interactions. In summary, the complementation between scene representation and classification forms the fundamental of a robot's environmental cognizance, facilitating its proficient navigation and nuanced interaction within its operational context.
The object awareness is a basis for robots to interact with others, which typically involves techniques such as object detection, classification, and semantic segmentation [169]. The combination of those tasks can identify objects and help understand their significance, role, and potential interactions in a given scene [170]. Specifically, object detection is the process of locating and identifying multiple objects in a video stream, which provides both the class and spatial location of the objects [171]. To this end, YOLO [172], SSD [173], and Fast R-CNN [174] were leveraged in target detection. YOLO is the most well-known framework for its high-speed performance. SSD combines the speed of YOLO and the advantages of multi-scale feature interpretations that can detect targets with different sizes efficiently. For the Faster R-CNN, although it performs well in terms of accuracy, it is relatively slow due to the two-stage detection process. Once an object is detected, object classification is utilized to categorize it into a specific class or group, which helps robots exclude irrelevant objects and focus on the target object [175]. Beyond the detection and classification of visual objects, semantic segmentation can provide insights into the pixel-wise partition of the environment to the robot [162]. For semantic segmentation, U-Net [176] is a classical method that uses skip connection to effectively restore spatial information, which is especially suitable for image segmentation. In addition, SegNet [177] was used for the robots with limited resources in semantic segmentation, highlighting the memory-efficient segmentation by using the pooled index in the encoding stage for upsampling. More recently, Segment Anything Model [178] made significant progress in this area, which provides a general segmentation framework that solves this challenge through the cross-domain adaptation strategy. The object awareness in robots, facilitated by computer vision techniques, ensures that robots can recognize, understand, and interact with individual entities in their surroundings.
The activity awareness allows robots to perceive, interpret, and respond to dynamic events, which is the basis for the real-time interactions, involving behavioral recognition and prediction [179]. Specifically, the goal of behavioral recognition is to identify and understand ongoing activities or behaviors of objects. Yin et al. [180] proposed a parametric nonlinear time alignment method using deep autoencoder that learns nonlinear metric from inter-class and intra-class variations for human action recognition. Husain et al. [181] presented a robust, 2-D CNN network extended to a concatenated 3-D CNN network that can extract the features from the spatial-temporal domain of a video sequence, and the benchmark shows that their method is more general and flexible than others that require preprocessing (e.g., by optical flow) or a priori knowledge on sensing (e.g., camera motion estimation). Once recognizing the behaviors of sensed objects, the behavioral prediction allows robots to be proactive to potential events [182]. Jain et al. [183] proposed a sensory-fusion architecture to jointly model multiple data streams and a sequence-to-sequence training approach for anticipating driving maneuvers several seconds before they actually happen. This type of awareness is indispensable for robots to work in harmony with humans, ensuring safety, efficiency, and a more human-centric approach in their operations.
8.2. Camera-Based Intelligent Controlling for Robots
Cameras not only enhance the robot's perception but also allow it to give real-time feedback, enabling it to better plan and control [184]. This process can be classified into two aspects: planning and interaction [185]. The former allows robots to determine the best course of action based on the environment, objects, and activities they perceive, while the latter enables robots to physically interact with other entities in the environment, particularly with specific objects, based on the planning [162]. They are elaborated as follows.
With certain awareness, cameras enable robots to plan their action by interpreting the visual data [186]. Among these applications, the path planning has been extensively studied, such as local obstacle avoidance, indoor navigation, and multi-robot navigation [187]. For a single robot, Duguleana et al. [188] proposed a path planning algorithm based on Q-learning and artificial neural networks, achieving the collision-free trajectories of robot in dynamic workspaces. For multiple robots, Chen et al. [189] presented a decentralized multi-agent collision avoidance algorithm using deep reinforcement learning to learn a value function that encodes cooperative behaviors and generates high quality paths.
The ability to interact with objects is crucial for many robotic applications, and cameras provide an essential way of perception for precise and safe interactions. The interaction can be classified into two aspects: object interaction and human-robot collaboration. For object interaction, Pinto et al. [190] conducted a self-supervision approach to learn robotic grasping from 50K tries and 700 hours of robot experience using trial-and-error, and showed its effectiveness in the real robot platform, from which they found that a multi-stage learning method can improve performance. In the human-robot collaboration, Agravante et al. [191] described a framework that combines vision and haptic information in collaborative carrying tasks between humans and robots. In conclusion, camera-based control in evolutionary robotics is transforming the way that robots operate, which bridges the gap between perception and task performing with higher efficiency, precision, and safety.
In addition, the application of reinforcement learning and online learning can be applied to evolve the robots, allowing themselves to be adapted to new environments or new tasks, improving the quality of operations. For reinforcement learning, it allows robots to learn from their interactions with the environment directly. By receiving feedback in forms of rewards or penalties based on their actions, robots can adapt and optimize their behavior over time. Zhu et al. [192] proposed a deep Siamese Actor-Critic network based on the deep reinforcement learning, which considers both the current state and target image for better generalization to new targets. For online learning, it can be used to update the robot's knowledge based on the real-time observations, allowing them to be automatically adaptive to new scenarios, which is particularly useful in complex environments with dynamic changes. Wang et al. [193] proposed an unsupervised three-stage learning architecture consisting of long-term, short-term and online learning for visual interestingness recognition, showing the promising performance against the supervised learning methods. In summary, the integration of reinforcement learning and online learning can enhance the robot’s capability in new unseen and complex environments.
8.3. Camera-Based Health Monitoring Robot
With the development of camera-based sensing and controlling, the robots that can be evolutionary on intelligence can perform tasks with high efficiency, precision and safety [185]. Developing health monitoring robots is one of emerging trends in robotic applications, improving the quality of healthcare and patient monitoring [194]. According to the application scenarios, health monitoring robots can be divided into three types: physiological monitoring, rehabilitation, and interaction and social support [195].
For physiological monitoring, camera-based vital signs monitoring has been investigated in multiple clinical settings, including intensive care unit (ICU) and neonatal ICU [196,197]. It allows the robots to measure heart rate, blood pressure, oxygen saturation, and other physiological parameters by a contactless video camera [198‒200]. Huang et al. [201] explored the combination of different wavelengths of a video camera for pulse transit time-based blood pressure estimation, which showed that the green-NIR wavelength combination has the highest correlation with blood pressure and gives the best calibration results. This measure allows the robots to further predict potential health risks and arterial diseases by intensively monitoring the blood pressure, which is beneficial for home-based care and chronic disease management.
Robots that can monitor rehabilitation play a pivotal role in assisting patients to recover from injuries and surgeries, which provides guidance for physical therapy exercises, ensuring that patients perform them correctly and consistently [202,203]. With camera-based intelligent sensing, robots can monitor a patient's movements, provide feedback, and adjust the intensity of exercises based on the patient's progress [204,205]. Taati et al. [206] proposed a vision-based method to monitor and assess postures in real-time during robotic rehabilitation therapy for stroke patients. Quah et al. [207] proposed a head tracking system using the camera data for neck rehabilitation training, which can be used for neck mobility assessment and training. Moreover, the visual data collected during this process can be shared with healthcare professionals, allowing them to track the patient's progress and make necessary adjustments to the rehabilitation plan [203].
For the interaction and social support, health monitoring robots can be used to provide societal support to, for example, elders as a chat robot by using large language model like GPT [208,209]. Using the camera data, it can recognize human emotions and physiology, engage in conversation, and even detect micro signs of depression or anxiety [210,211]. Rossi et al. [212] conducted a social trial that explored the role of social robots in reducing anxiety for pediatric healthcare, finding that compared to a control group without a robot, the robot reduced medical anxiety and perceived pain in children during the vaccination. In addition, by providing companionship, these robots can alleviate feelings of loneliness and isolation, which are common among the elderly or people with limited mobility [213]. For social support, the monitoring robots can remind patients to take medicine, attend appointments, and even provide entertainment, ensuring a holistic approach to care.
In summary, health monitoring robots combined with camera and AI technology will bring revolutionary innovation to the medical and healthcare fields. They provide safer, more efficient and personalized care for patients, also providing effective assistance for caregivers.
9. Real-Time Control of High-Dimensional Robots
9.1. Evolutionary Control
In terms of evolutionary control, numerous works have been conducted on evolving robot brains using artificial evolution. Beer & Gallagher [214] applied GA to evolve time constraints, thresholds, and connection weights of neural networks for a six-legged insect-like robot in 1992. Ram et al. [215] divided navigation problems into basic behaviors that were implemented while evolving collision-free paths using GA in 1994. Floreano et al. [216] used GA for learning of NN of the Khepera robot, a small differential wheeled mobile robot, in 1994. Grefenstette and Schultz [217] utilized GA for learning and evolved collision-free navigation for a Nomad 200 mobile robot in 1995. Nolfi and Parisi [218] modified Khepera with a gripper to locate, recognize, and grasp a target object in 1995. Lund et al. [73] applied GA and genetic programming (GP) to the automated synthesis of robot controllers in 1996. Meeden [219] evolved NN based controller for a 4-wheeled robot using GA in 1996. Baluja [220] used population-based incremental learning for the NN controller in 1996. Nordin and Banzhaf [221] evolved obstacle avoidance and object-following behavior for Khepera using GA in 1997. Smith [222] developed a vision-based football player, Khepera, in 1997. Jeong and Lee [223] evolved a two-stage controller for two-wheeled soccer-playing robots using GA in 1997. Pratihar et al. [224] evolved a fuzzy logic controller using GA for collision-free navigation in the presence of moving obstacles in 1999. He further developed an NN controller for robots using evolutionary techniques in 2003 [225]. Kalra and Prakash [226] proposed a neuro-genetic approach for the inverse kinematics solution of a planner robotic manipulator in 2003. Pires et al. [227] generated robot trajectory planning using a multi-objective genetic algorithm (MOGA) for 2R and 3R manipulators in 2004. Nelson et al. [228] worked on maze exploration using integrating evolutionary robotic environment in 2004. Harvey et al. [229] presented a study on evolutionary robotics as a new scientific tool for studying cognition in 2006. Koos et al. [230,231] evolved fitness and transferability to overcome the reality gap and tested for an 8-DoF quadrupedal robot in 2010. Fukunaga et al. [232] evolved a controller to perform high-level tasks on a service robot using GP in 2012. Montes-Gonzalez and Contreras [233] evolved Khepera in a simulated environment to collect cylinders that simulate food in 2013. Risi and Stanley [234] evolved a function through Hypercube-based Neuro Evolution of Augmenting Topologies (Hyper-NEAT) that takes morphology as input and outputs an NN controller fitted for the specific morphology in 2013. Morse et al. [235] evolved legged motion using a Single-Unit Pattern Generator (SUPG) which evolved through NEAT in 2013. Chen et al. [57] proposed an evolutionary design methodology of multilayer feed-forward neural networks based on a constructive approach using GA in 2013. Recently, Miras et al. [236] compared the evolving controllers versus learning controllers for morphologically evolvable robots. Chen et al. [237] proposed a global compensation method combining the GA-DNN (deep neural network) nonlinear regression prediction model and the compliance error model to achieve the robot’s high-precision positioning performance under any external payload in 2020. The field of evolutionary robotics has covered various milestones to cope with the challenging task of robot control, but it is still open to further intricacies such as complex mechanisms, dynamic environments, and cluttered workspaces, requiring more flexible controllers.
9.2. Real-Time Control via Model Order Reduction
The model order reduction methods reviewed in Sect. 6 provide reduced-order models (ROMs) that can predict the dynamics of high-dimensional robots in real-time. Therefore, extending these ROMs with control inputs enables real-time control of high-dimensional robots. Indeed, data-driven ROMs have been emerged as a powerful tool for achieving real-time control of soft robotics [238].
Linear model reduction schemes have obtained some success for the control of linearized systems of nonlinear systems [238‒240]. POD has been used to construct a low-dimensional ROM for the dynamically closed-loop control of a soft robotic arm [239]. However, the validity of the linearized model deteriorates rapidly when it is far away from the linearization point. To capture the missing nonlinearities, piecewise-affine approximation has been proposed in [240] to approximate a highly nonlinear system as a collection of linearized systems. Hyper-reduction with energy-conserving mesh sampling and weight scheme has been used to construct ROMs that enable inverse-kinematic control of soft robots [241]. Koopman operator-based approach has also been used for the control of soft robotics [242].
As reviewed in Sect. 6, the linear model reduction methods have inherent limitations when they are applied to nonlinear systems. Thus, constructing nonlinear ROMs is more reasonable for the control of high-dimensional nonlinear robots. Following this direction, neural networks (NN) have been used extensively for learning these high-dimensional nonlinear dynamics from observed data. Model-based reinforcement learning has been used for the closed-loop control of soft robotic manipulators [144]. Recently, Alora et al. [129] developed a novel ROM model predictive control (ROMPC) for solving constrained optimal control problems of high-dimensional systems. Their ROMs are based on the DBML reviewed in Sect. 6 and hence have better performance. Indeed, they have demonstrated the effectiveness of the ROMPC on the trajectory tracking control of a soft robot with nearly 10,000 states [129,130].
10. Fault Monitoring and Maintenance of Evolutionary Robots
Elaborated robots with high accuracies of positioning and locomotion, high endurance, and speed control, are of great demands in surgery, medical service, intellectual manufacturing production line, outer space operation, etc. One of the most significant issues in these robots is the wear problem at the joints. Similar to the elderly mankind, the worn joint also bothers the robot when executing its work. The worn joint is often found to cause the failing of the robots, such as unexpected stop or malfunctional operation, regardless of how perfectly the controlling system is designed and works. Therefore, extensive research works have been done on locomotion algorithm, joint coating, online monitoring, etc., in order to extend the lifespan of the joint parts.
Condition-based maintenance (CBM) is a widely used strategy to improve the maintainability of the industrial robot, basically by detecting the wear progress at its early stage. By establishing a nonlinear observer for fault detection, people can effectively monitor the evolution of wear process, thus a timely intervention can be conducted for deterioration prevention. Ray et al. developed an optimal filtering and Bayesian detection for the friction torque estimate. This diagnostics successfully detects the load changing induced variation of friction characteristics over a wide range and has been experimentally verified its applicability [243]. Márton reported a method for monitoring the changes in the quality of gear transmission lubrication of the robotic joint. The proposed algorithm only takes joint position, velocity and external temperature into account for the residual signal generation, and the viscous coefficient of friction and lubricant consistency can be effectively supervised [244]. Márton also further studied the temperature effect on this friction estimation. In this case, a temperature estimator is developed since the real-time temperature is often found difficult to acquire online, and the results show that the Coulomb friction force is temperature independent while the viscosity relies on temperature [245]. Moreover, Márton completed an explicit study of robot actuator fault by establishing an energy approach. In this work, the author recalled a few critical relations to describe the energy balance of a robot and correlated it to the actuator fault successfully [246]. Similarly, Chen et al. also applied the energy-based fault detection method for dissipative systems. In this work, the authors constructed a novel system energy balance, and a full states measurable case can be monitored by examining the validity of such energy balance [247]. Bittencourt et al. also analyzed the wear in robot joints under temperature uncertainties. The effect of wear on a robotic joint was examined through experiments and a friction model was built for fundamental understanding, which effectively distinguished the effect of wear over a large variation of temperature [248].
The fault monitoring and associated algorithm provide us with a route to intervene in the failure of robot in time, while an effective method should also be developed to practically measure the wear and even slow down its evolution. In line with this point of view, extensive work has been done to investigate the wear between joint part and its counter body in real-time. Kumar et al. studied the influence of shock wave surface treatment on vibration behavior of semi-solid state cast AA5083- aluminosilicate composite. The semi-solid state casting method was applied to fabricate a composite, where the as-casted aluminum was greatly enhanced by addition of different weight percentages of Al2SiO5, followed by a shock wave surface treatment in a subsonic wind tunnel. The result indicated that the newly manufactured composite held outstanding mechanical performance, and exhibited a great potential of the application in the area of industrial robotic joint [249]. Furthermore, the same research group proposed am MWCNT-based nanocomposite and a nanoclay composite, and applied them in the redundant articulated robot (RAR). The researchers discovered that by employing these nanocomposites, the dynamic performance of RAR was much improved [250]. Kida and his co-workers conducted a systematic work on the wear of PEEK against different metallic counter bodies in humanoid robot joint, and compared the influence of various working conditions on the wear behavior of this polymer. The results indicate that the lifetime of the PEEK depends on the counter body used in the tribo-system, with titanium worn the PEEK twice faster than the aluminum. Furthermore, the wear mechanism of PEEK against aluminum was attributed to the fatigue wear, while a reinforced PEEK (containing PTFE, graphite and carbon fibres) can form transfer film and serve as solid lubricant to slow down the wear of the PEEK [251‒253]. Burris’ group systematically investigated the wear and lubrication issues in articular cartilage [254]. They discovered that the synovial fluid and hyaluronic acid solutions were much viscous than the saline lubricants and capable of significantly improving the rate of fluid and lubricant recovery. This finding can practically be applied to the robotic joint applications and a much-enhanced wear property can be expected.
In addition to the robotic joint, electro adhesion (EA) is another area that also concerns about the materials tribology. In recent years, EA technology has experienced an unprecedented growth and garners wide attention. With its unique advantages, it has been extensively applied in robotics, and plays an important role in improving the hardware of robot systems, adaptability of robots towards various environments, and the safety of human-robot interaction, which significantly broaden the application scenarios of robots. However, the performance of the EA system will degrade or even fail when subject to a tribo-system after certain amount of time, which seriously influences the reliability of the EA-based robotic system. Thus, researchers put many efforts in improving the tribological performance of the dielectric layer so as to enhance the lifespan of the robot. Zeng et al. employed ion implantation technique to modify the surface property of UHMWPE, and characterized the surface morphology, mechanical properties, molecular structure of the property altered material. It clearly evidences that by performing ion implantation, the tribological properties of UHMWPE can be tremendously enhanced [255]. Wei et al. studied the influence of testing condition on the wear rate of hair and skin, the results of which can be directly applied to the corresponding biomedical applications [256]. Krick et al. performed a series of studies on the optimization of PTFE and PEEK [257‒260]. The researchers discovered that the reinforcement of PTFE by alumina nanocomposites can deliver an ultralow wear of 7 × 10-8 mm3/Nm, and the tribofilm formation was hypothesized as the origin of such mechanical performance enhancement. Furthermore, such enhancement was believed to be highly correlated to alumina fillers. Alam et al. analyzed the independent roles of surface and subsurface reinforcements on PEEK wear property. They reported that the effects of surface and subsurface were contributed individually rather than being synergetic or an optimum of either. This shed light on the optimization of the PEEK by individually tuning the surface and subsurface for the overall enhancement [261].
In a brief conclusion, involving tribology in the robotics indeed makes a great amount of contributions to the advancement of robots, in regard to the lifetime, reliability, working efficiency, energy consumption, etc. However, this interdisciplinary field is still quite empty and more attentions are needed to further accelerate the development of robotics.
11. Evolutionary Robotics for Intelligent Infrastructure Construction and Maintenance
The architectural engineering and construction (AEC) industry accounts for nearly 6% of global GDP and is experiencing a rapid technological revolution consisting of virtual planning enabled by building information modelling (BIM) and physical execution promoted by automation and robotics [262‒264]. BIM is a highly digitalized building space with comprehensive interactivity and integration with diverse digital technologies towards intelligence. The core value of BIM lies in the dynamic generation and iteration of the knowledge about building objects through information aggregation for decision-making during their life cycles from design, construction to operation and maintenance [265]. However, most of current BIM applications are situated at the building design stage where simulation, optimization, and prediction are the main focuses. This is largely due to a lack of dynamic process-oriented information from the building and its subsystems (e.g., Internet of Things (IoT) and building robots) which is key to provide real-time monitoring and adjustment for infrastructure construction and maintenance [266,267]. In addition, a significant number of BIM applications have shown the lag and inaccuracy of manual in-process data collection and model updating, highlighting the need for full automation which could be realized by sensing systems embedded in the building elements under construction, the surrounding environment, and the robots for construction or maintenance.
The advent of “Industry 4.0” has prompted rapid development and applications of robotics for enhancing construction productivity and sustainability. Various robots have been proposed for applications in infrastructure construction and maintenance scenarios such as prefabricated building assembly, 3-D concrete printing and building façade inspection [268,269]. These cases often combine robots, IoTs, machine vision and BIM to achieve greater cost efficiency and technical adaptability towards the end goal of automated and intelligent operations. In contrast to manufacturing industry where robots have been made ever stiffer by implementing controllers to improve accuracy and repeatability of the motion and avoid any unintended contact operations for the sake of performing specific and repetitive tasks in a factory setting, infrastructure construction and maintenance feature open-air operations exposed to the natural environment, leading to the complexity and variability in the working space of robots. The successful stiff design of robotics in factory settings makes it detrimental in the context of infrastructure construction and maintenance, where tasks are uncertain and the presence of humans is ubiquitous. To address this challenge, evolutionary robotics aims at introducing elasticity and flexibility in the robot body, decreasing the overall stiffness while embracing and harnessing mechanical interactions with the built environment. Evolutionary robotics is expected to foster the use of autonomous systems in construction and maintenance jobsites where human-robot interaction is preeminent, for example, fast assembly of prefabricated building elements, building complex inspection and rehabilitation.
To facilitate intelligent behaviors of an evolutionary robot operating in the built environment, comprehensive information about the building should be available in the robot's world. In the AEC industry, BIM technologies are widely used throughout the lifecycle of construction projects. 3D object-oriented modeling techniques of BIM allow the creation of accurate and information-rich 3D BIM models during the building phase. The BIM models can then be used for various purposes, including model-based building performance analysis, cost analysis, construction planning, real-time analysis of the built environment, and executive decision-making regarding construction, operation, and maintenance [270,271]. Compared to these efforts of extending the boundary of BIM, insufficient effort has been made in incorporating aspects of robot operations into BIM-based processes. Particularly, little attention has been paid to creating methods to transfer information from BIM into a robot's semantic world. While some studies have emphasized the need to link BIM and robotic platforms to facilitate the adoption of robots in the AEC industry, they have not developed methodology to use information in BIM for robotization. For future revolutionary robotics in building applications, it is therefore of great importance to research and develop approaches that allow robots to retrieve building lifecycle information while performing task planning and execution in a building environment. What is equally worth exploration and innovation is automating the building world modeling process that allows the construction industry to achieve context-aware behaviors of autonomous robots without intensive manual encoding of the building information into the robots.
12. Conclusions
With more than 270 literatures, this paper reviews the evolutionary robotics on its critical issues in deformable morphology and multivariable stiffness, and examines the development in the field in the past 30 years. In particular, the paper reviews the morphing of robot structures with variable topology and the development of morphology in deformable materials that could be used for evolutionary robots. This deformable materials with variable stiffness are used in reconfigurable robots. The techniques in elastic cavity structure, in elastomer airbag actuators, in shape memory polymer actuator are reviewed. Further, the reversible and irreversible deformations are presented in the use of reconfigurable robots. These techniques project a future prospect of the evolutionary robots that have the ability in morphing natures and in adapting natures. Further work in dynamics particularly with the model order reduction and its following control is reviewed with the actuation strategy of metamorphic robots. The paper further reviews camera-based intelligent sensing, intelligent controlling and health monitoring of evolutionary robots, and covers the evolutionary control and the control via model order reduction. With the condition-based maintenance, maintainability of an evolutionary robot can be improved with a fault monitoring being provided. The paper hence presents a prospect of evolutionary robots with a potential of deformable morphology and multivariable stiffness that have an ability of coping with changing environments and various tasks, casting light on the future direction for the evolutionary robotics, as well as its application in the architectural engineering and construction industry throughout infrastructure’s lifecycle.
Author Contributions: Conceptualization, J.S.D. and H.F.; methodology, J.S.D. and H.F.; software, H.F., Y.X., H.L., Z.T., W.W., Z.W., G.Z., M.L. and J.S.D.; validation, H.F.; formal analysis, H.F., Y.X., H.L., Z.T., W.W., Z.W., G.Z. and M.L.; investigation, H.F., Y.X., H.L., Z.T., W.W., Z.W., G.Z. and M.L.; resources, J.S.D.; data curation, H.F.; writing—original draft preparation, H.F., Y.X., H.L., Z.T., W.W., Z.W., G.Z., M.L. and J.S.D.; writing—review and editing, H.F., Z.T., J.S.D.; visualization, H.L. and Z.T.; supervision, J.S.D.; project administration, J.S.D. and H.F.; funding acquisition, J.S.D. All authors have read and agreed to the published version of the manuscript.
Funding: This research was funded by the National Key R&D Program of China, grant number 2022YFB4701200, and the Science, Technology and Innovation Commission of Shenzhen Municipality, grant number ZDSYS20220527171403009 and JCYJ20220818100417038.
Data Availability Statement: Not applicable.
Conflicts of Interest: The authors declare no conflict of interest.
References
- Evolutionary-Robotics. Available online: https://cmte.ieee.org/futuredirections/2019/04/01/evolutionary-robotics/ (Accessed on 8 October 2023).
- Doncieux, S.; Bredeche, N.; Mouret, J.B.; et al. Evolutionary robotics: what, why, and where to. Frontiers in Robotics and AI 2015, 2(4), 1–18. DOI: https://doi.org/10.3389/frobt.2015.00004
- Harvey, I. Evolutionary Robotics and SAGA: The Case for Hill Crawling and Tournament Selection. Langton, C. ed., Artificial Life III, Santa Fe Institute Studies in the Sciences of Complexity, Proc. Vol. XVI: Addison-Wesley: Reading, MA, 1993, pp. 299–326.
- Gupta, S.; Singla, E. Evolutionary robotics in two decades: A review. Sadhana 2015, 40, 1169–1184. DOI: https://doi.org/10.1007/s12046-015-0357-7
- Dai, J.S.; Rees Jones, J. Mobility in metamorphic mechanisms of foldable/erectable kinds. Journal of Mechanical Design 1999, 121(3), 375–382. DOI: https://doi.org/10.1115/1.2829470
- Aimedee, F.; Gogu, G.; Dai, J.S.; et al. Systematization of morphing in reconfigurable mechanisms. Mechanism and Machine Theory 2016, 96, 215–224. DOI: https://doi.org/10.1016/j.mechmachtheory.2015.07.009
- Dai, J.S.; Wang, D.; Cui, L. Orientation and workspace analysis of the multifingered metamorphic hand—Metahand. IEEE Transactions on Robotics 2009, 25(4), 942–947. DOI: https://doi.org/10.1109/TRO.2009.2017138
- Lee, D.Y.; Kim, S.R.; Kim, J.S.; et al. Origami wheel transformer: A variable-diameter wheel drive robot using an origami structure. Soft Robotics 2017, 4(2), 163–180. DOI: https://doi.org/10.1089/soro.2016.0038
- Felton, S.; Tolley, M.; Demaine, E.; et al. A method for building self-folding machines. Science 2014, 345(6197), 644–646. DOI: https://doi.org/10.1126/science.1252610
- Miyashita, S.; Guitron, S.; Ludersdorfer, M.; et al. An untethered miniature origami robot that self-folds, walks, swims, and degrades. 2015 IEEE International Conference on Robotics and Automation (ICRA). IEEE: Washington, USA, 2015, pp. 1490–1496. DOI: https://doi.org/10.1109/ICRA.2015.7139386
- Belke, C.H.; Paik, J. Mori: a modular origami robot. IEEE/ASME Transactions on Mechatronics, 2017, 22(5), 2153–2164. DOI: https://doi.org/10.1109/TMECH.2017.2697310
- Jeong, D.; Lee, K. Design and analysis of an origami-based three-finger manipulator. Robotica 2018, 36(2), 261–274. DOI: https://doi.org/10.1017/S0263574717000340
- Tang, Z.; Qi, P.; Dai, J.S. Mechanism design of a biomimetic quadruped robot. Industrial Robot: An International Journal 2017, 44(4), 512–520. DOI: https://doi.org/10.1108/IR-11-2016-0310
- Tang, Z.; Wang, K.; Spyrakos-Papastavridis, E.; et al. Origaker: a novel multi-mimicry quadruped robot based on a metamorphic mechanism. Journal of Mechanisms and Robotics, Transactions of the ASME 2022, 14(6), 060907. DOI: https://doi.org/10.1115/1.4054408
- Ghafoor, A.; Dai, J.S.; Duffy, J. Stiffness modeling of the soft-finger contact in robotic Grasping. Journal of Mechanical Design 2004, 126(4), 646–656. DOI: https://doi.org/10.1115/1.1758255
- Zhao, J.S.; Wang, J.Y.; Chu, F.; et al. Structure synthesis and statics analysis of a foldable stair. Mechanism and Machine Theory 2011, 46(7), 998–1015. DOI: https://doi.org/10.1016/j.mechmachtheory.2011.02.001
- Chocron, O.; Bidaud, P. Genetic design of 3d modular manipulators. Proceedings of 1997 IEEE International Conference on Robotics and Automation. IEEE: Albuquerque, NM, USA, 1997, vol. 1, pp. 223–228.
- Chung, W.K.; Han, J.; Youm, Y.; et al. Task based design of modular robot manipulator using efficient genetic algorithm. Proceedings of 1997 IEEE International Conference on Robotics and Automation. IEEE: Albuquerque, NM, USA, 1997, vol. 1, pp. 507–512.
- Jia, G.; Huang, H.; Li, B.; et al. Synthesis of a novel type of metamorphic mechanism module for large scale deployable grasping manipulators. Mechanism and Machine Theory 2018, 128, 544–559. DOI: https://doi.org/10.1016/j.mechmachtheory.2018.06.017
- Jia, G.; Huang, H.; Wang, S.; et al. Type synthesis of plane-symmetric deployable grasping parallel mechanisms using constraint force parallelogram law. Mechanism and Machine Theory 2021, 161, 104330. DOI: https://doi.org/10.1016/j.mechmachtheory.2021.104330
- Jia, G.; Li, B.; Huang, H.; et al. Type synthesis of metamorphic mechanisms with scissor-like linkage based on different kinds of connecting pairs. Mechanism and Machine Theory 2020, 151, 103848. DOI: https://doi.org/10.1016/j.mechmachtheory.2020.103848
- Zhuang, Z.; Guan, Y.; Xu, S.; et al. Reconfigurability in automobiles—structure, manufacturing and algorithm for automobiles. International Journal of Automotive Manufacturing and Materials 2022, 1(1), 1. DOI: https://doi.org/10.53941/ijamm0101001
- Funes, P.; Pollack, J. Evolutionary body building: Adaptive physical designs for robots. Artificial Life 1998, 4(4), 337–357. DOI: https://doi.org/10.1162/106454698568639
- Funes, P.; Pollack, J. Computer evolution of buildable objects. Evolutionary Design by Computers 1999, 1, 387–403.
- Hornby, G.S.; Pollack, J.B. The advantages of generative grammatical encodings for physical design. Proceedings of the 2001 Congress on Evolutionary Computation. IEEE: Seoul, Korea, 2001, vol. 1, pp. 600–607.
- Hornby, G.S.; Lipson, H.; Pollack, J.B. Generative representations for the automated design of modular physical robots. IEEE Transactions on Robotics and Automation 2003, 19(4), 703–719. DOI: https://doi.org/10.1109/TRA.2003.814502
- Dai, J.S.; Wang, D. Differential geometry based analysis and synthesis of a multifingered robotic hand with a metamorphic palm. International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Philadelphia, Pennsylvania, USA, 10–13 September, 2006, vol. 42568, pp. 1005–1016.
- Dai, J.S.; Wang, D. Co-Axial Plane Synthesis of a Metamorphic Stage of a Novel Robot Hand with A Metamorphic Spherical Palm. 15th International Conference on Mechanisms and Machine Science, Yinchuan, China, 2006, pp. 14–18.
- Dai, J.S.; Wang, D. Geometric analysis and synthesis of the metamorphic robotic hand. Journal of Mechanical Design 2007, 129(11), 1191–1197. DOI: https://doi.org/10.1115/1.2771576
- Wang, D.; Cui, L.; Dai, J.S. Analysis of the metamorphic multifingered dexterous hand. Journal of Mechanical Engineering 2008, 44(8), 1–6. DOI: https://doi.org/10.3901/JME.2008.08.001
- Cui, L.; Wang, D.; Dai, J.S. Dimensional synthesis of palm of multifingered metamorphic dexterous hand. Journal of Dalian University of Technology 2009, 49(3), 380–386.
- Cui, L.; Dai, J.S. Posture, workspace, and manipulability of the metamorphic multifingered hand with an articulated palm. Journal of Mechanisms and Robotics, Transactions of the ASME 2011, 3(2), 021001. DOI: https://doi.org/10.1115/1.4003414
- Cui, L.; Dai, J.S. Reciprocity-based singular value decomposition for inverse kinematic analysis of the metamorphic multifingered hand. Journal of Mechanisms and Robotics, Transactions of the ASME 2012, 4(3), 034502. DOI: https://doi.org/10.1115/1.4006187
- Cui, L.; Cupcic, U.; Dai, J.S. An optimization approach to teleoperation of the thumb of a humanoid robot hand: Kinematic mapping and calibration. Journal of Mechanical Design 2014, 136(9), 091005. DOI: https://doi.org/10.1115/1.4027759
- Gao, Z.; Wei, G.; Dai, J.S. Inverse kinematics and workspace analysis of the metamorphic hand. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science 2015, 229(5), 965–975. DOI: https://doi.org/10.1177/0954406214541429
- Emmanouil, E.; Wei, G.; Dai, J.S. Spherical trigonometry constrained kinematics for a dexterous robotic hand with an articulated palm. Robotica 2016, 34(12), 2788–2805. DOI: https://doi.org/10.1017/S0263574715000399
- Cui, L.; Sun, J.; Dai, J.S. In-hand forward and inverse kinematics with rolling contact. Robotica 2017, 35(12), 2381–2399. DOI: https://doi.org/10.1017/S026357471700008X
- An, W.; Wei, J.; Lu, X.; et al. Geometric design-based dimensional synthesis of a novel metamorphic multi-fingered hand with maximal workspace. Chinese Journal of Mechanical Engineering 2021, 34(1), 41. DOI: https://doi.org/10.1186/s10033-021-00558-3
- Bai, R.; Kang, R.; Shang, K.; et al. A humanoid robotic hand capable of internal assembly and measurement in spacesuit gloves. Industrial Robot: The international journal of robotics research and application 2022, 49(4), 603–615. DOI: https://doi.org/10.1108/IR-09-2021-0205
- Lin, Y.H.; Wang, T.; Spyrakos-Papastavridis, E.; et al. Minimum Friction Coefficient-Based Precision Manipulation Workspace Analysis of the Three-Fingered Metamorphic Hand. Journal of Mechanisms and Robotics, Transactions of the ASME 2023, 15(5), 051018. DOI: https://doi.org/10.1115/1.4062238
- Zykov, V.; Mytilinaios, E.; Desnoyer, M.; et al. Evolved and designed self-reproducing modular robotics. IEEE Transactions on Robotics 2007, 23(2), 308–319. DOI: https://doi.org/10.1109/TRO.2007.894685
- Zhang, L.; Wang, D.; Dai, J.S. Biological Modeling and Evolution Based Synthesis, Journal of Mechanical Design 2008, 130(7), 072303. DOI: https://doi.org/10.1115/1.2900719
- Rout, B.; Mittal, R. Optimal design of manipulator parameter using evolutionary optimization techniques. Robotica 2010, 28(3), 381–395. DOI: https://doi.org/10.1017/S0263574709005700
- Bongard, J. Morphological change in machines accelerates the evolution of robust behavior. Proceedings of the National Academy of Science 2011, 108(4), 1234–1239. DOI: https://doi.org/10.1073/pnas.1015390108
- Rubrecht, S.; Singla, E.; Padois, V.; et al. Evolutionary design of a robotic manipulator for a highly constrained environment. New Horizons in Evolutionary Robotics: Extended Contributions from the 2009 EvoDeRob Workshop. Springer: Berlin Heidelberg, Germany, 2011, pp. 109–121. DOI: https://doi.org/10.1007/978-3-642-18272-3_8
- Tolley, M.T.; Hiller, J.D.; Lipson, H. Evolutionary design and assembly planning for stochastic modular robots. New Horizons in Evolutionary Robotics: Extended Contributions from the 2009 EvoDeRob Workshop. Springer: Berlin Heidelberg, Germany, 2011, pp. 211–225. DOI: https://doi.org/10.1007/978-3-642-18272-3_14
- Zhang, C.; Dai, J.S. Continuous static gait with twisting trunk of a metamorphic quadruped robot. Mechanical Sciences 2018, 9(1), 1–14. DOI: https://doi.org/10.5194/ms-9-1-2018
- Zhang, C.; Dai, J.S. Trot gait with twisting trunk of a metamorphic quadruped robot. Journal of Bionic Engineering 2018, 15, 971–981. DOI: https://doi.org/10.1007/s42235-018-0085-x
- Zhang, C.; Chai, X.; Dai, J.S. Preventing Tumbling with a Twisting Trunk for the Quadruped Robot: Origaker I. International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. ASME: Quebec City, QC, Canada, 2018, vol. 51814, p. V05BT07A010.
- Li, T.; Zhang, C.; Wang, S.; et al. Jumping with expandable trunk of a metamorphic quadruped robot—the origaker II. Applied Sciences 2019, 9(9), 1778. DOI: https://doi.org/10.3390/app9091778
- Zhang, C.; Zhang, C.; Dai, J.S.; et al. Stability margin of a metamorphic quadruped robot with a twisting trunk. Journal of Mechanisms and Robotics, Transactions of the ASME 2019, 11(6), 064501. DOI: https://doi.org/10.1115/1.4044600
- Wang, S.; Wang, K.; Zhang, C.; et al. Kinetostatic backflip strategy for self-recovery of quadruped robots with the selected rotation axis. Robotica 2022, 40(6), 1713–1731. DOI: https://doi.org/10.1017/S0263574721001326
- Guan, Y.; Zhuang, Z.; Zhang, C.; et al. Design and Motion Planning of a Metamorphic Flipping Robot. Actuators 2022, 11(12), 344. DOI: https://doi.org/10.3390/act11120344
- Liu, H.H.; Dai, J.S. An approach to carton-folding trajectory planning using dual robotic fingers. Robotics and Autonomous Systems 2003, 42(1), 47–63. DOI: https://doi.org/10.1016/S0921-8890(02)00312-3
- Dai, J.S.; Caldwell, D.G. Origami-based robotic paper-and-board packaging for food industry. Trends in Food Science & Technology 2010, 21(3), 153–157. DOI: https://doi.org/10.1016/j.tifs.2009.10.007
- Jia, G.; Huang, H.; Guo, H.; et al. Design of transformable hinged ori-block dissected from cylinders and cones. Journal of Mechanisms and Robotics, Transactions of the ASME 2021, 143(9), 094501. DOI: https://doi.org/10.1115/1.4050301
- Chen, C.H.; Yao, T.K.; Kuo, C.M.; et al. Evolutionary design of constructive multilayer feedforward neural network. Journal of Vibration and Control 2013, 19(16), 2413–2420. DOI: https://doi.org/10.1177/1077546312456726
- Howard, D.; Eiben, A.E.; Kennedy, D.F.; et al. Evolving embodied intelligence from materials to machines. Nature Machine Intelligence 2019, 1(1), 12–19. DOI: https://doi.org/10.1038/s42256-018-0009-9
- Lipson, H.; Pollack, J.B. Automatic design and manufacture of robotic lifeforms. Nature 2000, 406(6799), 974–978. DOI: https://doi.org/10.1038/35023115
- Rieffel, J.; Sayles, D. Evofab: A fully embodied evolutionary fabricator. International Conference on Evolvable Systems. Springer: Berlin, Heidelberg, Germany, 2010, pp. 372–380. DOI: https://doi.org/10.1007/978-3-642-15323-5_32
- Kuehn, T.J. Evolutionary fabrication: a system of autonomous invention. Proceedings of the 14th annual conference companion on Genetic and evolutionary computation. ACM: Jilin, China, 2012, pp. 579–584. DOI: https://doi.org/10.1145/2330784.2330877
- Wei, G.; Dai, J.S.; Wang, S.; et al. Kinematic analysis and prototype of a metamorphic anthropomorphic hand with a reconfigurable palm. International Journal of Humanoid Robotics 2011, 8(3), 459–479. DOI: https://doi.org/10.1142/S0219843611002538
- Eiben, A.; Kernbach, S.; Aasdijk, E. Embodied artificial evolution. Evolutionary Intelligence 2012, 5(4), 261–272. DOI: https://doi.org/10.1007/s12065-012-0071-x
- Wang, L.; Zheng, D.; Harker, P.; et al. Evolutionary design of magnetic soft continuum robots. Proceedings of the National Academy of Sciences 2021, 118(21), e2021922118. DOI: https://doi.org/10.1073/pnas.2021922118
- Wang, G.; Phan, T.V.; Li, S.; et al. Robots as models of evolving systems. Proceedings of the National Academy of Sciences 2022, 119(12), e2120019119. DOI: https://doi.org/10.1073/pnas.2120019119
- Eiben, A.E.; Hart, E.; Timmis, J.; et al. Towards autonomous robot evolution. Software Engineering for Robotics. Springer: Berlin, Heidelberg, Germany, 2021, pp. 29–51. DOI: https://doi.org/10.1007/978-3-030-66494-7_2
- Eiben, A.E.; Ellers, J.; Meynen, G.; et al. Robot Evolution: Ethical Concerns. Frontiers in Robotics and AI 2021, 8, 344. DOI: https://doi.org/10.3389/frobt.2021.744590
- Eiben, A.E. Real-world robot evolution: Why would it (not) work? Frontiers in Robotics and AI 2021, 8, 696452. DOI: https://doi.org/10.3389/frobt.2021.696452
- Husbands, P.; Shim, Y.; Garvie, M.; et al. Recent advances in evolutionary and bio-inspired adaptive robotics: Exploiting embodied dynamics. Applied Intelligence 2021, 51(9), 6467–6496. DOI: https://doi.org/10.1007/s10489-021-02275-9
- Sims, K. Evolving 3D morphology and behavior by competition. Artificial Life 1994, 1(4), 353–372. DOI: https://doi.org/10.1162/artl.1994.1.4.353
- Sims, K. Evolving virtual creatures. Proceedings of the 21st Annual Conference on Computer Graphics and Interactive Techniques-SIGGRAPH'94. ACM: Orlando, Florida, USA, 1994, pp. 15–22. DOI: https://doi.org/10.1145/192161.192167
- Lee, W.P.; Hallam, J.; Lund, H.H. A hybrid GP/GA approach for co-evolving controllers and robot bodies to achieve fitness-specified tasks. Proceedings of IEEE International Conference on Evolutionary Computation. IEEE: Nagoya, Japan, 1996, pp. 384–389.
- Lund, H.H.; Hallam, J.; Lee, W.P. Evolving robot morphology. IEEE International Conference on Evolutionary Computation. IEEE: Indianapolis, IN, USA, 1997, pp. 197–202.
- Chocron, O.; Bidaud, P. Evolutionary algorithm for global design of locomotion systems. Proceedings of the 1999 IEEE/RSJ International Conference on Intelligent Robots and Systems. Human and Environment Friendly Robots with High Intelligence and Emotional Quotients (Cat. No. 99CH36289). IEEE: Kyongju, Korea, 1999, vol. 3, pp. 1573–1578.
- Chocron, O.; Bidaud, P. Evolving walking robots for global task based design. Proceedings of the 1999 Congress on Evolutionary Computation-CEC 99 (Cat. No. 99TH8406). IEEE: Washington, DC, USA, 1999, vol. 1, pp. 405–412.
- Pollack, J.B.; Lipson, H. The golem project: Evolving hardware bodies and brains. Proceedings of the Second NASA/DoD Workshop on Evolvable Hardware. IEEE: Palo Alto, California, USA, 2000, pp. 37–42.
- Pollack, J.B.; Lipson, H.; Ficici, S.; et al. Evolutionary techniques in physical robotics. In Evolvable Systems: From Biology to Hardware. ICES 2000. Lecture Notes in Computer Science, Miller, J., Thompson, A., Thomson, P., Fogarty, T.C., Eds.; Springer: Berlin, Heidelberg, Germany, 2000, vol. 1801, pp. 175–186. DOI: https://doi.org/10.1007/3-540-46406-9_18
- Paul, C.; Bongard, J.C. The road less travelled: Morphology in the optimization of biped robot locomotion. Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE: Maui, HI, USA, 2001, vol. 1, pp. 226–232.
- Hornby, G.S.; Lipson, H.; Pollack, J.B. Evolution of generative design systems for modular physical robots. Proceedings of the 2001 IEEE International Conference on Robotics and Automation. IEEE: Seoul, Korea, 2001, vol. 4, pp. 4146–4151.
- Hornby, G.S.; Pollack, J.B. Body-brain co-evolution using l-systems as a generative encoding. Proceedings of the Genetic and Evolutionary Computation Conference (GECCO-2001). Morgan Kaufmann: San Francisco, California, USA, 2001, pp. 868–875.
- Pollack, J.B.; Lipson, H.; Hornby, G.; et al. Three generations of automatically designed robots. Artificial Life 2001, 7(3), 215–223. DOI: https://doi.org/10.1162/106454601753238627
- Stanley, K.O.; Miikkulainen, R. Evolving neural networks through augmenting topologies. Evolutionary Computation 2002, 10(2), 99–127. DOI: https://doi.org/10.1162/106365602320169811
- Chocron, O.; Brener, N.; Bidaud, P.; et al. Evolutionary synthesis of structure and control for locomotion systems. Climbing and Walking Robots: Proceedings of the 7th International Conference CLAWAR 2004. Springer: Berlin Heidelberg, Germany, 2005, pp. 879–888. DOI: https://doi.org/10.1007/3-540-29461-9_86
- Aminzadeh, V.; Walker, R.; Cupcic, U.; et al. Friction Compensation and Control Strategy for the Dexterous Robotic Hands. Advances in Reconfigurable Mechanisms and Robots I. Springer: London, UK, 2012, pp. 697–705. DOI: https://doi.org/10.1007/978-1-4471-4141-9_62
- Lipson, H. Evolutionary robotics and open-ended design automation. Biomimetics 2005, 17(9), 129–155. DOI: https://doi.org/10.1201/9780849331633.ch4
- Bongard, J.C. Evolutionary robotics. Communications of the ACM 2013, 56(8), 74–83. DOI: https://doi.org/10.1145/2493883
- Nolfi, S.; Bongard, J.C.; Husbands, P.; et al. Evolutionary robotics. In Springer Handbook of Robotics, Siciliano, B., Khatib, O. Eds.; Springer: Cham, Switzerland, 2016, pp. 2035–2068. DOI: https://doi.org/10.1007/978-3-319-32552-1_76
- Shah, D.; Yang, B.; Kriegman, S.; et al. Shape Changing Robots: Bioinspiration, Simulation, and Physical Realization. Advanced Materials 2021, 33, 2002882. DOI: https://doi.org/10.1002/adma.202002882
- Sun, J.; Lerner, E.; Tighe, B.; et al. Embedded shape morphing for morphologically adaptive robots. Nature Communications 2023, 14, 6023. DOI: https://doi.org/10.1038/s41467-023-41708-6
- Baines, R.; Patiballa, S.K.; Booth, J.; et al. Multi-environment robotic transitions through adaptive morphogenesis. Nature 2022, 610, 283–289. DOI: https://doi.org/10.1038/s41586-022-05188-w
- Kim, H.; Ahn, S.K.; Mackie, D.M.; et al. Shape morphing smart 3D actuator materials for micro soft robot. Materials Today 2020, 41, 243–269. DOI: https://doi.org/10.1016/j.mattod.2020.06.005
- Li, M.; Pal, A.; Aghakhani, A.; et al. Soft actuators for real-world applications. Nature Reviews Materials 2022, 7, 235–249. DOI: https://doi.org/10.1038/s41578-021-00389-7
- Dawood, M.; El-Tahan, M.W.; Zheng, B. Bond behavior of superelastic shape memory alloys to carbon fiber reinforced polymer composites. Composites Part B: Engineering 2015, 77, 238–247. DOI: https://doi.org/10.1016/j.compositesb.2015.03.043
- Wu, J.T.; Yuan, C.; Ding, Z.; et al. Multi-shape active composites by 3D printing of digital shape memory polymers. Scientific Reports 2016, 6, 24224. DOI: https://doi.org/10.1038/srep24224
- Leng, X.; Hu, X.; Zhao, W.; et al. Recent Advances in Twisted-Fiber Artificial Muscles. Advanced Intelligent Systems 2021, 3, 2000185. DOI: https://doi.org/10.1002/aisy.202000185
- Lima, M.D.; Li, N.; de Andrade, M.J.; et al. Electrically, Chemically, and Photonically Powered Torsional and Tensile Actuation of Hybrid Carbon Nanotube Yarn Muscles. Science 2012, 338, 928–932. DOI: https://doi.org/10.1126/science.1226762
- Chortos, A.; Hajiesmaili, E.; Morales, J.; et al. 3D Printing of Interdigitated Dielectric Elastomer Actuators. Advanced Functional Materials 2020, 30, 1907375. DOI: https://doi.org/10.1002/adfm.201907375
- Pelrine, R.; Kornbluh, R.; Pei, Q.; et al. High-Speed Electrically Actuated Elastomers with Strain Greater Than 100%. Science 2000, 287, 836–839. DOI: https://doi.org/10.1126/science.287.5454.836
- Duduta, M.; Hajiesmaili, E.; Zhao, H.; et al. Realizing the potential of dielectric elastomer artificial muscles. Proceedings of the National Academy of Sciences 2019, 116, 2476–2481. DOI: https://doi.org/10.1073/pnas.1815053116
- Davidson, Z.S.; Shahsavan, H.; Aghakhani, A.; et al. Monolithic shape-programmable dielectric liquid crystal elastomer actuators. Science Advances 2019, 5, eaay0855. DOI: https://doi.org/10.1126/sciadv.aay0855
- Ford, M.J.; Ambulo, C.P.; Kent, T.A.; et al. A multifunctional shape-morphing elastomer with liquid metal inclusions. Proceedings of the National Academy of Sciences 2019, 116, 21438–21444. DOI: https://doi.org/10.1073/pnas.1911021116
- Aksoy, B.; Shea, H. Reconfigurable and Latchable Shape-Morphing Dielectric Elastomers Based on Local Stiffness Modulation. Advanced Functional Materials 2020, 30, 2001597. DOI: https://doi.org/10.1002/adfm.202001597
- Liu, K.; Hacker, F.; Daraio, C. Robotic surfaces with reversible, spatiotemporal control for shape morphing and object manipulation. Science Robotics 2021, 6, eabf5116. DOI: https://doi.org/10.1126/scirobotics.abf5116
- Kramer, D.; Viswanath, R.N.; Weissmüller, J. Surface-Stress Induced Macroscopic Bending of Nanoporous Gold Cantilevers. Nano Letters 2004, 4, 793–796. DOI: https://doi.org/10.1021/nl049927d
- Acerce, M.; Akdogan, E.K.; Chhowalla, M. Metallic molybdenum disulfide nanosheet-based electrochemical actuators. Nature 2017, 549, 370–373. DOI: https://doi.org/10.1038/nature23668
- Chu, H.T.; Hu, X.H.; Wang, Z.; et al. Unipolar stroke, electroosmotic pump carbon nanotube yarn muscles. Science 2021, 371, 494–498. DOI: https://doi.org/10.1126/science.abc4538
- Gorissen, B.; Melancon, D.; Vasios, N.; et al. Inflatable soft jumper inspired by shell snapping. Science Robotics 2020, 5, eabb1967. DOI: https://doi.org/10.1126/scirobotics.abb1967
- Cacucciolo, V.; Shintake, J.; Kuwajima, Y.; et al. Stretchable pumps for soft machines. Nature 2019, 572, 516–519. DOI: https://doi.org/10.1038/s41586-019-1479-6
- Jiang, C.; Rist, F.; Wang, H.; et al. Shape-morphing mechanical metamaterials. Computer-Aided Design 2022, 143, 103146. DOI: https://doi.org/10.1016/j.cad.2021.103146
- Dudek, K.K.; Martínez, J.A.I.; Ulliac, G.; et al. Micro-Scale Auxetic Hierarchical Mechanical Metamaterials for Shape Morphing. Advanced Materials 2022, 34, 2110115. DOI: https://doi.org/10.1002/adma.202110115
- Wenz, F.; Schmidt, I.; Leichner, A.; et al. Designing Shape Morphing Behavior through Local Programming of Mechanical Metamaterials. Advanced Materials 2021, 33, 2008617. DOI: https://doi.org/10.1002/adma.202008617
- Hwang, D.; Barron, E.J.; Haque, A.B.M.T.; et al. Shape morphing mechanical metamaterials through reversible plasticity. Science Robotics 2022, 7, eabg2171. DOI: https://doi.org/10.1126/scirobotics.abg2171
- Ge, Q.; Sakhaei, A.H.; Lee, H.; et al. Multimaterial 4D printing with tailorable shape memory polymers. Scientific Reports 2016, 6(1), 31110. DOI: https://doi.org/10.1038/srep31110
- Zhang, B.; Li, H.; Cheng, J.; et al. Mechanically Robust and UV‐Curable Shape‐Memory Polymers for Digital Light Processing Based 4D Printing. Advanced Materials 2021, 33(27), 202101298. DOI: https://doi.org/10.1002/adma.202101298
- Wang, D.; Zhao, B.; Li, X.; et al. Dexterous electrical-driven soft robots with reconfigurable chiral-lattice foot design. Nature Communications 2023, 14(1), 5067. DOI: https://doi.org/10.1038/s41467-023-40626-x
- Montarnal, D.; Capelot, M.; Tournilhac, F.; et al. Silica-like malleable materials from permanent organic networks. Science 2011, 334(6058), 965–968. DOI: https://doi.org/10.1126/science.1212648
- Zhao, Q.; Zou, W.; Luo, Y.; et al. Shape memory polymer network with thermally distinct elasticity and plasticity. Science Advances 2016, 2(1), e150129. DOI: https://doi.org/10.1126/sciadv.1501297
- Jin, B.; Song, H.; Jiang, R.; et al. Programming a crystalline shape memory polymer network with thermo-and photo-reversible bonds toward a single-component soft robot. Science Advances 2018, 4(1), eaao3865. DOI: https://doi.org/10.1126/sciadv.aao3865
- Cui, C.; An, L.; Zhang, Z.; et al. Reconfigurable 4D Printing of Reprocessable and Mechanically Strong Polythiourethane Covalent Adaptable Networks. Advanced Functional Materials 2022, 32(29), 2203720. DOI: https://doi.org/10.1002/adfm.202203720
- Cheng, N.G.; Gopinath, A.; Wang, L.; et al. Thermally tunable, self‐healing composites for soft robotic applications. Macromolecular Materials and Engineering 2014, 299(11), 1279–1284. DOI: https://doi.org/10.1002/mame.201400017
- Van Meerbeek, I.M.; Mac Murray, B.C.; Kim, J.W.; et al. Morphing metal and elastomer bicontinuous foams for reversible stiffness, shape memory, and self‐healing soft machines. Advanced Materials 2016, 28(14), 2801–2806. DOI: https://doi.org/10.1002/adma.201505991
- Majidi, C.; Wood, R.J. Tunable elastic stiffness with microconfined magnetorheological domains at low magnetic field. Applied Physics Letters 2010, 97(16), 164104. DOI: https://doi.org/10.1063/1.3503969
- Wang, D.; Li, L.; Zhang, B.; et al. Effect of temperature on the programmable helical deformation of a reconfigurable anisotropic soft actuator. International Journal of Solids and Structures 2020, 199, 169–180. DOI: https://doi.org/10.1016/j.ijsolstr.2020.04.028
- Zhang, Y.F.; Zhang, N.; Hingorani, H.; et al. Fast‐response, stiffness‐tunable soft actuator by hybrid multimaterial 3D printing. Advanced Functional Materials 2019, 29(15), 1806698. DOI: https://doi.org/10.1002/adfm.201806698
- Wei, X.; Li, H.; He, X.; et al. Shape memory polymer-based stiffness variable soft actuator via digital light processing-based 3D printing. 2021 27th International Conference on Mechatronics and Machine Vision in Practice (M2VIP). IEEE: Shanghai, China, 2021, pp. 612–616. DOI: https://doi.org/10.1109/M2VIP49856.2021.9665032
- Hwang, D. A Kirigami Approach for Controlling Properties of Adhesives and Composites. Ph.D. Thesis, Virginia Tech, Blacksburg, VA, USA, 2022.
- Zhang, K.; Dai, J.S. A kirigami-inspired 8R linkage and its evolved overconstrained 6R linkages with the rotational symmetry of order two. Journal of Mechanisms and Robotics, Transactions of the ASME 2014, 6(2), 021008. DOI: https://doi.org/10.1115/1.4026337
- Zhang, K.; Qiu, C.; Dai, J.S. Helical kirigami-enabled centimeter-scale worm robot with shape-memory-alloy linear actuators. Journal of Mechanisms and Robotics, Transactions of the ASME 2015, 7(2), 021014. DOI: https://doi.org/10.1115/1.4029494
- Alora, J.I.; Pabon, L.A.; Köhler, J.; et al. Robust nonlinear reduced-order model predictive control. arXiv preprint 2023, arXiv:2309.05746.
- Alora, J.I.; Cenedese, M.; Schmerling, E.; et al. Data-driven spectral submanifold reduction for nonlinear optimal control of high-dimensional robots. 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE: London, UK, 2023, pp. 2627–2633. DOI: https://doi.org/10.1109/ICRA48891.2023.10160418
- Tao, F.; Zhang, H.; Liu, A.; et al. Digital twin in industry: State-of-the-art. IEEE Transactions on Industrial Informatics 2018, 15(4), 2405–2415. DOI: https://doi.org/10.1109/TII.2018.2873186
- Qin, L.; Peng, H.; Huang, X.; et al. Modeling and simulation of dynamics in soft robotics: a review of numerical approaches. Current Robotics Reports 2023, 1–13. DOI: https://doi.org/10.1007/s43154-023-00105-z
- Shabana, A. Continuum-based geometry/analysis approach for flexible and soft robotic systems. Soft Robotics 2018, 5(5), 613–621. DOI: https://doi.org/10.1089/soro.2018.0007
- Gao, A.; Li, J.; Zhou, Y.; et al. Modeling and task-oriented optimization of contact-aided continuum robots. IEEE/ASME Transactions on Mechatronics 2020, 25(3), 1444–1455. DOI: https://doi.org/10.1109/TMECH.2020.2977107
- Jawed, M.K.; Novelia, A.; O'Reilly, O.M. A Primer on the Kinematics of Discrete Elastic Rods. Springer: Cham, Switzerland, 2018. DOI: https://doi.org/10.1007/978-3-319-76965-3
- Han, S.; Bauchau, O.A. Nonlinear three-dimensional beam theory for flexible multibody dynamics. Multibody System Dynamics 2015, 34, 211–242. DOI: https://doi.org/10.1007/s11044-014-9433-8
- Tian, Q.; Flores, P.; Lankarani, H.M. A comprehensive survey of the analytical, numerical and experimental methodologies for dynamics of multibody mechanical systems with clearance or imperfect joints. Mechanism and Machine Theory 2018, 122, 1–57. DOI: https://doi.org/10.1016/j.mechmachtheory.2017.12.002
- De Klerk, D.; Rixen, D.J.; Voormeeren, S.N. General framework for dynamic substructuring: history, review and classification of techniques. AIAA Journal 2008, 46(5), 1169–1181. DOI: https://doi.org/10.2514/1.33274
- Luo, K.; Hu, H.; Liu, C.; et al. Model order reduction for dynamic simulation of a flexible multibody system via absolute nodal coordinate formulation. Computer Methods in Applied Mechanics and Engineering 2017, 324, 573–594. DOI: https://doi.org/10.1016/j.cma.2017.06.029
- Proctor, J.L.; Brunton, S.L.; Kutz, J.N. Dynamic mode decomposition with control. SIAM Journal on Applied Dynamical Systems 2016, 15(1), 142–161. DOI: https://doi.org/10.1137/15M1013857
- Bruder, D.; Remy, C.D.; Vasudevan, R. Nonlinear system identification of soft robot dynamics using Koopman operator theory. 2019 International Conference on Robotics and Automation (ICRA). IEEE: Montreal, QC, Canada, 2019, pp. 6244–6250. DOI: https://doi.org/10.1109/ICRA.2019.8793766
- Cenedese, M.; Axås, J.; Bäuerlein, B.; et al. Data-driven modeling and prediction of non-linearizable dynamics via spectral submanifolds. Nature Communications 2022, 13(1), 872. DOI: https://doi.org/10.1038/s41467-022-28518-y
- Li, M.; Jain, S; Haller, G. Nonlinear analysis of forced mechanical systems with internal resonance using spectral submanifolds, Part I: Periodic response and forced response curve. Nonlinear Dynamics 2022, 110(2), 1005–1043. DOI: https://doi.org/10.1007/s11071-022-07714-x
- Thuruthel, T.G.; Falotico, E.; Renda, F.; et al. Model-based reinforcement learning for closed-loop dynamic control of soft robotic manipulators. IEEE Transactions on Robotics 2018, 35(1), 124–134. DOI: https://doi.org/10.1109/TRO.2018.2878318
- Li, G.; Shintake, J.; Hayashibe, M. Deep reinforcement learning framework for underwater locomotion of soft robot. 2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE: Xi'an, China, 2021, pp. 12033–12039. DOI: https://doi.org/10.1109/ICRA48506.2021.9561145
- George, H.; Jain, S.; Cenedese, M. Dynamics-based machine learning for nonlinearizable phenomena. Data-driven reduced models on spectral submanifolds. SIAM News, 2022, 55(5), 1–4.
- Gogu, G. Structural synthesis of parallel robots. Springer: Dordrecht, the Netherlands, 2008. DOI: https://doi.org/10.1007/978-1-4020-5710-6
- Tian, Y.; Yao, Y.A.; Wang, J. A rolling 8-bar linkage mechanism. Journal of Mechanisms and Robotics 2015, 7(4), 041002. DOI: https://doi.org/10.1115/1.4029117
- Li, S.J.; Wang, H.G.; Dai, J.S. The equivalent resistance gradient model of metamorphic mechanisms and the design method. Chinese Journal of Mechanical Engineering 2014, 50(1),18–23. DOI: https://doi.org/10.3901/JME.2014.01.018
- Li, S.J.; Wang, H.G.; Li, X.P.; et al. Task-orientated Design Method of Practical Constraint Metamorphic Mechanisms. Chinese Journal of Mechanical Engineering 2018, 54(3), 26–35. DOI: https://doi.org/10.3901/JME.2018.03.026
- Dai, J.S.; Kang, X.; Song, Y.Q.; et al. Reconfigurable Mechanisms and Robots (in Chinese). Higher Education Press: Beijing China, 2021.
- Lo´pez-Custodio, P.; Müller, A.; Kang, X.; et al. Tangential intersection of branches of motion. Mechanism and Machine Theory 2020, 147, 103730. DOI: https://doi.org/10.1016/j.mechmachtheory.2019.103730
- Rus, D.; Tolley, M.T. Design, fabrication and control of soft robots. Nature 2015, 521(7553), 467–475. DOI: https://doi.org/10.1038/nature14543
- Xi, F.; Zhao, Y.; Wang, J.; et al. Two actuation methods for a complete morphing system composed of a VGTM and a compliant parallel mechanism. Journal of Mechanisms and Robotics 2021, 13(2), 021020. DOI: https://doi.org/10.1115/1.4049975
- Wang, J.; Xi, F. Robotic fish scales driven by a skin muscle mechanism. Mechanism and Machine Theory 2022, 172, 104797. DOI: https://doi.org/10.1016/j.mechmachtheory.2022.104797
- Hu, W.; Lum, G.Z.; Mastrangeli, M.; et al. Small-scale soft-bodied robot with multimodal locomotion. Nature 2018, 554(7690), 81–85. DOI: https://doi.org/10.1038/nature25443
- Pan, J.; Yu, J.; Pei, X. A novel shape memory alloy actuated soft gripper imitated hand behavior. Frontiers of Mechanical Engineering 2022, 17(4), 44. DOI: https://doi.org/10.1007/s11465-022-0700-8
- Zhang, S.; Ke, X.; Jiang, Q.; et al. Programmable and reprocessable multifunctional elastomeric sheets for soft origami robots. Science Robotics 2021, 6(53), eabd6107. DOI: https://doi.org/10.1126/scirobotics.abd6107
- Zhong, Y.; Tang, W.; Zhang, C.; et al. Programmable thermochromic soft actuators with “two dimensional” bilayer architectures for soft robotics. Nano Energy 2022, 102, 107741. DOI: https://doi.org/10.1016/j.nanoen.2022.107741
- Li, S.; Vogt, D.M.; Rus, D.; et al. Fluid-driven origami-inspired artificial muscles. Proceedings of the National Academy of Sciences 2017, 114(50), 13132–13137. DOI: https://doi.org/10.1073/pnas.1713450114
- Kunze, L.; Hawes, N.; Duckett, T.; et al. Artificial Intelligence for Long-Term Robot Autonomy: A Survey. IEEE Robotics and Automation Letters 2018, 3(4), 4023–4030. DOI: https://doi.org/10.1109/LRA.2018.2860628
- Ruiz-del-Solar, J.; Loncomilla, P.; Soto, N. A survey on deep learning methods for robot vision. arXiv preprint 2018, arXiv:1803.10862.
- Wan, S.; Goudos, S. Faster R-CNN for multi-class fruit detection using a robotic vision system. Computer Networks 2020, 168, 107036. DOI: https://doi.org/10.1016/j.comnet.2019.107036
- Zeng, R.; Wen, Y.; Zhao, W.; et al. View planning in robot active vision: A survey of systems, algorithms, and applications. Computational Visual Media 2020, 6, 225–245. DOI: https://doi.org/10.1007/s41095-020-0179-3
- Zhou, B.; Lapedriza, A.; Xiao, J.; et al. Learning deep features for scene recognition using places database. Advances in Neural Information Processing Systems 27 2014. Available online: https://proceedings.neurips.cc/paper/2014/file/3fe94a002317b5f9259f82690aeea4cd-Paper.pdf (8 October 2023).
- Zhang, Q.; Xu, Z.; Kang, Y.; et al. Distilled representation using patch-based local-to-global similarity strategy for visual place recognition. Knowledge-Based Systems 2023, 111015. DOI: https://doi.org/10.1016/j.knosys.2023.111015
- Xie, S.; Girshick, R.; Dollár, P.; et al. Aggregated residual transformations for deep neural networks. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2017, pp. 1492–1500. DOI: https://doi.org/10.1109/CVPR.2017.634
- Ye, C.; Yang, Y.; Mao, R.; et al. What can i do around here? deep functional scene understanding for cognitive robots. 2017 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2017, pp. 4604–4611. DOI: https://doi.org/10.1109/ICRA.2017.7989535
- Yao, J.; Fidler, S.; Urtasun, R. Describing the scene as a whole: Joint object detection, scene classification and semantic segmentation. 2012 IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2012, pp. 702–709.
- Mottaghi, R.; Chen, X.; Liu, X.; et al. The role of context for object detection and semantic segmentation in the wild. Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, IEEE, 2014, pp. 891–898. DOI: https://doi.org/10.1109/CVPR.2014.119
- Liu, L.; Ouyang, W.; Wang, X.; et al. Deep learning for generic object detection: A survey. International Journal of Computer Vision 2020, 128, 261–318. DOI: https://doi.org/10.1007/s11263-019-01247-4
- Jiang, P.; Ergu, D.; Liu, F.; et al. A Review of Yolo algorithm developments. Procedia Computer Science 2022, 199, 1066–1073. DOI: https://doi.org/10.1016/j.procs.2022.01.135
- Jeong, J.; Park, H.; Kwak, N. Enhancement of SSD by concatenating feature maps for object detection. arXiv preprint 2017, arXiv:1705.09587. DOI: https://doi.org/10.5244/C.31.76
- Girshick, R. Fast r-cnn. Proceedings of the IEEE International Conference on Computer Vision, IEEE, 2015, pp. 1440–1448. DOI: https://doi.org/10.1109/ICCV.2015.169
- Zou, Z.; Chen, K.; Shi, Z.; et al. Object detection in 20 years: A survey. Proceedings of the IEEE 2023. DOI: https://doi.org/10.1109/JPROC.2023.3238524
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015: 18th International Conference, Munich, Germany, 5–9 October 2015, Proceedings, Part III 18, Springer: Cham, Switzerland, 2015, pp. 234–241. DOI: https://doi.org/10.1007/978-3-319-24574-4_28
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence 2017, 39(12), 2481–2495. DOI: https://doi.org/10.1109/TPAMI.2016.2644615
- Kirillov, A.; Mintun, E.; Ravi, N.; et al. Segment anything. arXiv preprint 2023, arXiv:2304.02643.
- Coskun, H.; Tan, D.J.; Conjeti, S.; et al. Human motion analysis with deep metric learning. Proceedings of the European Conference on Computer Vision (ECCV), 2018, pp. 667–683. DOI: https://doi.org/10.1007/978-3-030-01264-9_41
- Yin, X.; Chen, Q. Deep metric learning autoencoder for nonlinear temporal alignment of human motion. 2016 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2016, pp. 2160–2166. DOI: https://doi.org/10.1109/ICRA.2016.7487366
- Husain, F.; Dellen, B.; Torras, C. Action recognition based on efficient deep feature learning in the spatio-temporal domain. IEEE Robotics and Automation Letters 2016, 1(2), 984–991. DOI: https://doi.org/10.1109/LRA.2016.2529686
- Kong, Y.; Fu, Y. Human action recognition and prediction: A survey. International Journal of Computer Vision 2022, 130(5), 1366–1401. DOI: https://doi.org/10.1007/s11263-022-01594-9
- Jain, A.; Singh, A.; Koppula, H.S.; et al. Recurrent neural networks for driver activity anticipation via sensory-fusion architecture. 2016 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2016, pp. 3118–3125. DOI: https://doi.org/10.1109/ICRA.2016.7487478
- Saeedvand, S.; Jafari, M.; Aghdasi, H.S.; et al. A comprehensive survey on humanoid robot development. The Knowledge Engineering Review 2019, 34, e20. DOI: https://doi.org/10.1017/S0269888919000158
- Robinson, N.; Tidd, B.; Campbell, D.; et al. Robotic vision for human-robot interaction and collaboration: A survey and systematic review. ACM Transactions on Human-Robot Interaction 2023, 12(1), 1–66. DOI: https://doi.org/10.1145/3570731
- Matheson, E.; Minto, R.; Zampieri, E.G.G.; et al. Human-robot collaboration in manufacturing applications: A review. Robotics 2019, 8(4), 100. DOI: https://doi.org/10.3390/robotics8040100
- Zhang, H.Y.; Lin, W.M.; Chen, A.X. Path planning for the mobile robot: A review. Symmetry 2018, 10(10), 450. DOI: https://doi.org/10.3390/sym10100450
- Duguleana, M.; Mogan, G. Neural networks based reinforcement learning for mobile robots obstacle avoidance. Expert Systems with Applications 2016, 62, 104–115. DOI: https://doi.org/10.1016/j.eswa.2016.06.021
- Chen, Y.F.; Liu, M.; Everett, M.; et al. Decentralized non-communicating multiagent collision avoidance with deep reinforcement learning. 2017 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2017, pp. 285–292. DOI: https://doi.org/10.1109/ICRA.2017.7989037
- Pinto, L.; Gupta, A. Supersizing self-supervision: Learning to grasp from 50k tries and 700 robot hours. 2016 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2016, pp. 3406–3413. DOI: https://doi.org/10.1109/ICRA.2016.7487517
- Agravante, D.J.; Cherubini, A.; Bussy, A.; et al. Collaborative human-humanoid carrying using vision and haptic sensing. 2014 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2014, pp. 607–612. DOI: https://doi.org/10.1109/ICRA.2014.6906917
- Zhu, Y.; Mottaghi, R.; Kolve, E.; et al. Target-driven visual navigation in indoor scenes using deep reinforcement learning. 2017 IEEE International Conference on Robotics and Automation (ICRA), IEEE, 2017, pp. 3357–3364. DOI: https://doi.org/10.1109/ICRA.2017.7989381
- Wang, C.; Qiu, Y.; Wang, W.; et al. Unsupervised online learning for robotic interestingness with visual memory. IEEE Transactions on Robotics 2021, 38(4), 2446–2461. DOI: https://doi.org/10.1109/TRO.2021.3129972
- Kyrarini, M.; Lygerakis, F.; Rajavenkatanarayanan, A.; et al. A survey of robots in healthcare. Technologies 2021, 9(1), 8. DOI: https://doi.org/10.3390/technologies9010008
- Robinson, H.; MacDonald, B.; Broadbent, E. The role of healthcare robots for older people at home: A review. International Journal of Social Robotics 2014, 6, 575–591. DOI: https://doi.org/10.1007/s12369-014-0242-2
- Wang, H.; Huang, J.; Wang, G.; et al. Contactless Patient Care Using Hospital IoT: CCTV Camera Based Physiological Monitoring in ICU. IEEE Internet of Things Journal 2023. DOI: https://doi.org/10.1109/JIOT.2023.3308477
- Zeng, Y.; Song, X.; Chen, H.; et al. A Multi-modal Clinical Dataset for Critically-Ill and Premature Infant Monitoring: EEG and Videos. 2022 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), IEEE, 2022, pp. 1–5. DOI: https://doi.org/10.1109/BHI56158.2022.9926840
- Slapničar, G.; Wang, W.; Luštrek, M. Feasibility of Remote Blood Pressure Estimation via Narrow-band Multi-wavelength Pulse Transit Time. ACM Transactions on Sensor Networks 2023. DOI: https://doi.org/10.1145/3597302
- Liao, G.; Shan, C.; Wang, W. Comparison of PPG and BCG Features for Camera-based Blood Pressure Estimation by Ice Water Stimulation. 2022 IEEE-EMBS International Conference on Biomedical and Health Informatics (BHI), IEEE, 2022, pp. 1–4. DOI: https://doi.org/10.1109/BHI56158.2022.9926833
- Wang, W.; Den Brinker, A.C.; Stuijk, S.; et al. Algorithmic principles of remote PPG. IEEE Transactions on Biomedical Engineering 2016, 64(7), 1479–1491. DOI: https://doi.org/10.1109/TBME.2016.2609282
- Huang, Y.; Huang, D.; Huang, J.; et al. Camera Wavelength Selection for Multi-wavelength Pulse Transit Time based Blood Pressure Monitoring. 2023 45rd Annual International Conference of the IEEE Engineering in Medicine & Biology Society (EMBC). 2023. Available online: https://arinex.com.au/EMBC/pdf/full-paper_580.pdf (8 October 2023). DOI: https://doi.org/10.1109/EMBC40787.2023.10340068
- Luo, S.; Meng, Q.; Li, S.; et al. Research of intent recognition in rehabilitation robots: a systematic review. Disability and Rehabilitation: Assistive Technology 2023, 1–12. DOI: https://doi.org/10.1080/17483107.2023.2170477
- Debnath, B.; O’brien, M.; Yamaguchi, M.; et al. A review of computer vision-based approaches for physical rehabilitation and assessment. Multimedia Systems 2022, 28(1), 209–239. DOI: https://doi.org/10.1007/s00530-021-00815-4
- Xiao, W.; Chen, K.; Fan, J.; et al. AI-driven rehabilitation and assistive robotic system with intelligent PID controller based on RBF neural networks. Neural Computing and Applications 2023, 35(22), 16021–16035. DOI: https://doi.org/10.1007/s00521-021-06785-y
- Vladareanu, L.; Yu, H.; Wang, H.; et al. Advanced Intelligent Control in Robots. Sensors 2023, 23(12), 5699. DOI: https://doi.org/10.3390/s23125699
- Taati, B.; Wang, R.; Huq, R.; et al. Vision-based posture assessment to detect and categorize compensation during robotic rehabilitation therapy. Proceedings of the 2012 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), IEEE, 2012, pp. 1607–1613. DOI: https://doi.org/10.1109/BioRob.2012.6290668
- Quah, C.K.; Ng, J.; Soon, B. A Portable Vision-Based Head Tracking Exergame Solution for Neck Rehabilitation. Proceedings of the AAAI Symposium Series 2023, 1(1), 23–27. DOI: https://doi.org/10.1609/aaaiss.v1i1.27470
- Rincon, J.A.; Costa, A.; Novais, P.; et al. A new emotional robot assistant that facilitates human interaction and persuasion. Knowledge and Information Systems 2019, 60, 363–383. DOI: https://doi.org/10.1007/s10115-018-1231-9
- Chuah, S.H.W.; Yu, J. The future of service: The power of emotion in human-robot interaction. Journal of Retailing and Consumer Services 2021, 61, 102551. DOI: https://doi.org/10.1016/j.jretconser.2021.102551
- Mellouk, W.; Handouzi, W. Facial emotion recognition using deep learning: review and insights. Procedia Computer Science 2020, 175, 689–694. DOI: https://doi.org/10.1016/j.procs.2020.07.101
- Rasouli, S.; Gupta, G.; Nilsen, E.; et al. Potential applications of social robots in robot-assisted interventions for social anxiety. International Journal of Social Robotics 2022, 14(5), 1–32. DOI: https://doi.org/10.1007/s12369-021-00851-0
- Rossi, S.; Larafa, M.; Ruocco, M. Emotional and behavioural distraction by a social robot for children anxiety reduction during vaccination. International Journal of Social Robotics 2020, 12, 765–777. DOI: https://doi.org/10.1007/s12369-019-00616-w
- Jecker, N.S. You’ve got a friend in me: sociable robots for older adults in an age of global pandemics. Ethics and Information Technology 2021, 23(Suppl 1), 35–43. DOI: https://doi.org/10.1007/s10676-020-09546-y
- Beer, R.D.; Gallagher, J.C. Evolving dynamical neural networks for adaptive behavior. Adaptive Behaviour 1992, 1(1), 91–122. DOI: https://doi.org/10.1177/105971239200100105
- Ram, A.; Boone, G.; Arkin, R.; et al. Using genetic algorithms to learn reactive control parameters for autonomous robotic navigation. Adaptive Behaviour 1994, 2(3), 277–305. DOI: https://doi.org/10.1177/105971239400200303
- Floreano, D.; Mondada, F. Automatic creation of an autonomous agent: Genetic evolution of a neural-network driven robot. From Animals to Animats 1994, 3, 421–430. DOI: https://doi.org/10.7551/mitpress/3117.003.0061
- Grefenstette, J.; Schultz, A. An evolutionary approach to learning in robots. In Machine Learning Workshop on Robot Learning. DTIC: New Brunswick, NJ, USA, 1994, pp. 659–662.
- Nolfi, S.; Parisi, D. Evolving non-trivial behaviors on real robots: an autonomous robot that picks up objects. In Congress of the Italian Association for Artificial Intelligence. Springer: Berlin, Heidelberg, Germany, 1995, pp. 243–254. DOI: https://doi.org/10.1007/3-540-60437-5_24
- Meeden, L.A. An incremental approach to developing intelligent neural network controllers for robots. IEEE Transactions on Systems, Man, and Cybernetics—Part B: Cybernetics 1996, 26(3), 474–485. DOI: https://doi.org/10.1109/3477.499797
- Baluja, S. Evolution of an artificial neural network based autonomous land vehicle controller. IEEE Transactions on Systems, Man, and Cybernetics—Part B: Cybernetics 1996, 26(3), 450–463. DOI: https://doi.org/10.1109/3477.499795
- Nordin, P.; Banzhaf, W. An on-line method to evolve behavior and to control a miniature robot in real time with genetic programming. Adaptive Behaviour 1997, 5(2), 107–140. DOI: https://doi.org/10.1177/105971239700500201
- Smith, T. Adding vision to Khepera: An autonomous robot footballer. Master’s thesis, School of Cognitive and Computing Sciences, University of Sussex, 1997.
- Jeong, I.K.; Lee, J.J. Evolving cooperative mobile robots using a modified genetic algorithm. Robotics and Autonomous Systems 1997, 21(2), 197–205. DOI: https://doi.org/10.1016/S0921-8890(97)00027-4
- Pratihar, D.K.; Deb, K.; Ghosh, A. A genetic-fuzzy approach for mobile robot navigation among moving obstacles. International Journal of Approximate Reasoning 1999, 20(2), 145–172. DOI: https://doi.org/10.1016/S0888-613X(98)10026-9
- Pratihar, D.K. Evolutionary robotics: a review. Sadhana 2003, 28(6), 999–1009. DOI: https://doi.org/10.1007/BF02703810
- Kalra, P.; Prakash, N.R. A neuro-genetic algorithm approach for solving the inverse kinematics of robotic manipulators. In SMC'03 Conference Proceedings. 2003 IEEE International Conference on Systems, Man and Cybernetics. Conference Theme-System Security and Assurance. IEEE: Washington, DC, USA, 2003, vol. 2, pp. 1979–1984.
- Pires, E.S.; Machado, J.T.; de Moura Oliveira, P.B. Robot trajectory planning using multi-objective genetic algorithm optimization. In Genetic and Evolutionary Computation–GECCO 2004: Genetic and Evolutionary Computation Conference, Seattle, WA, USA, June 26-30, 2004. Proceedings, Part I. Springer: Berlin Heidelberg, Germany, 2004, pp. 615–626. DOI: https://doi.org/10.1007/978-3-540-24854-5_64
- Nelson, A.L.; Grant, E.; Galeotti, J.M.; et al. Maze exploration behaviors using an integrated evolutionary robotics environment. Robotics and Autonomous Systems 2004, 46(3), 159–173. DOI: https://doi.org/10.1016/j.robot.2003.11.002
- Harvey, I.; Di Paolo, E.; Wood, R.; et al. Evolutionary robotics: A new scientific tool for studying cognition. Artificial Life 2005, 11(1–2), 79–98. DOI: https://doi.org/10.1162/1064546053278991
- Koos, S.; Mouret, J.B.; Doncieux, S. Crossing the reality gap in evolutionary robotics by promoting transferable controllers. In Proceedings of the 12th Annual Conference on Genetic and Evolutionary Computation. ACM: Portland, OR, USA, 2010, pp. 119–126. DOI: https://doi.org/10.1145/1830483.1830505
- Koos, S.; Mouret, J.B.; Doncieux, S. The transferability approach: Crossing the reality gap in evolutionary robotics. IEEE Transactions on Evolutionary Computation 2013, 17(1), 122–145. DOI: https://doi.org/10.1109/TEVC.2012.2185849
- Fukunaga, A.; Hiruma, H.; Komiya, K. Evolving controllers for high-level applications on a service robot: A case study with exhibition visitor flow control. Genetic Programming and Evolvable Machines 2012, 13(2), 239–263. DOI: https://doi.org/10.1007/s10710-011-9152-3
- Montes-Gonzalez, F.; Contreras, C.M. The evolution of motivated and modulated robot selection. International Journal of Advanced Robotic Systems 2013, 10(2), 125. DOI: https://doi.org/10.5772/53991
- Riis, S.; Stanley, K.O. Confronting the challenge of learning a flexible neural controller for a diversity of morphologies. In Proceeding of the 15th Annual Conference on Genetic and Evolutionary Computation Conference. ACM: Amsterdam, the Netherlands, 2013, pp. 255–262. DOI: https://doi.org/10.1145/2463372.2463397
- Morse, G.; Risi, S.; Snyder, C.R.; et al. Single-unit pattern generators for quadruped locomotion. In Proceeding of the 15th Annual Conference on Genetic and Evolutionary Computation Conference. ACM: Amsterdam, the Netherlands, 2013, pp. 719–726. DOI: https://doi.org/10.1145/2463372.2463461
- Miras, K.; De Carlo, M.; Akhatou, S.; et al. Evolving-controllers versus learning-controllers for morphologically evolvable robots. In Applications of Evolutionary Computation: 23rd European Conference, EvoApplications 2020, Held as Part of EvoStar 2020, Seville, Spain, April 15–17, 2020, Proceedings 23. Springer International Publishing, 2020, pp. 86–99. DOI: https://doi.org/10.1007/978-3-030-43722-0_6
- Chen, X.; Zhang, Q.; Sun, Y. Evolutionary robot calibration and nonlinear compensation methodology based on GA-DNN and an extra compliance error model. Mathematical Problems in Engineering 2020, 2020, 1–15. DOI: https://doi.org/10.1155/2020/3981081
- Thieffry, M.; Kruszewski, A.; Duriez, C.; et al. Control design for soft robots based on reduced-order model. IEEE Robotics and Automation Letters 2018, 4(1), 25–32. DOI: https://doi.org/10.1109/LRA.2018.2876734
- Katzschmann, R.K.; Thieffry, M.; Goury, O.; et al. Dynamically closed-loop controlled soft robotic arm using a reduced order finite element model with state observer. In 2019 2nd IEEE international conference on soft robotics (RoboSoft). IEEE: Seoul, Korea, 2019, pp. 717–724. DOI: https://doi.org/10.1109/ROBOSOFT.2019.8722804
- Tonkens, S.; Lorenzetti, J.; Pavone, M. Soft robot optimal control via reduced order finite element models. In 2021 IEEE International Conference on Robotics and Automation (ICRA). IEEE: Xi’an, China, 2021, pp. 12010–12016 DOI: https://doi.org/10.1109/ICRA48506.2021.9560999
- Goury, O.; Duriez, C. Fast, generic, and reliable control and simulation of soft robots using model order reduction. IEEE Transactions on Robotics 2018, 34(6), 1565–1576. DOI: https://doi.org/10.1109/TRO.2018.2861900
- Bruder, D.; Gillespie, B.; Remy, C.D.; et al. Modeling and control of soft robots using the Koopman operator and model predictive control. arXiv preprint 2019, arXiv:1902.02827. DOI: https://doi.org/10.15607/RSS.2019.XV.060
- Ray, L.R.; Townsend, J.R.; Ramasubramanian, A. Optimal Filtering and Bayesian Detection for Friction-Based Diagnostics in Machines. ISA Transactions 2001, 40(3), 207–221. DOI: https://doi.org/10.1016/S0019-0578(00)00049-5
- Márton, L. On-Line Lubricant Health Monitoring in Robot Actuators. In 2011 Australian Control Conference, IEEE, 2011, pp. 167–172.
- Márton, L.; van der Linden, F. Temperature Dependent Friction Estimation: Application to Lubricant Health Monitoring. Mechatronics 2012, 22(8), 1078–1084. DOI: https://doi.org/10.1016/j.mechatronics.2012.09.003
- Márton, L. Energetic Approach to Deal with Faults in Robot Actuators. In 2012 20th Mediterranean Conference on Control & Automation (MED), IEEE, 2012, pp. 85–90. DOI: https://doi.org/10.1109/MED.2012.6265619
- Chen, W.; Ding, S.X.; Khan, A.Q.; et al. Energy Based Fault Detection for Dissipative Systems. In 2010 Conference on Control and Fault-Tolerant Systems (SysTol), IEEE, 2010, pp. 517–521. DOI: https://doi.org/10.1109/SYSTOL.2010.5676008
- Bittencourt, A.C.; Axelsson, P.; Jung, Y.; et al. Modeling and Identification of Wear in a Robot Joint under Temperature Uncertainties. IFAC Proceedings Volumes 2011, 10293–10299. DOI: https://doi.org/10.3182/20110828-6-IT-1002.01078
- Kumar, P.S.S.R.; Mashinini, P.M.; Khan, M.A.; et al. The Influence of Shock Wave Surface Treatment on Vibration Behavior of Semi-Solid State Cast Aluminum—Al2SiO5 Composite. Crystals 2022, 12(11), 1587. DOI: https://doi.org/10.3390/cryst12111587
- Saravana Mohan, M.; Samuel Ratna Kumar, P.S. Influence of CNT-Based Nanocomposites in Dynamic Performance of Redundant Articulated Robot. Robotica 2021, 39(1), 153–164. DOI: https://doi.org/10.1017/S0263574720000272
- Itakura, K.; Koike, H.; Kida, K.; et al. Observation of Wear Surface between Pure PEEK and Counterpart Materials; Titanium and 7075 Aluminum Alloy, in Robot Joint. Applied Mechanics and Materials 2013, 307, 347–351. DOI: https://doi.org/10.4028/www.scientific.net/AMM.307.347
- Koike, H.; Kanemasu, K.; Itakura, K.; et al. Wear and Transmission Error between PEEK Bush and 7075 Aluminium Alloy Cam Plate Components in Robot Joints. Applied Mechanics and Materials 2013, 307, 3–8. DOI: https://doi.org/10.4028/www.scientific.net/AMM.307.3
- Koike, H.; Itakura, K.; Okazaki, S.; et al. Measurement of Backlash and Fatigue Wear of PEEK Bush in Robot Joint under Middle Load. Applied Mechanics and Materials 2013, 418, 38–43. DOI: https://doi.org/10.4028/www.scientific.net/AMM.418.38
- Farnham, M.S.; Ortved, K.F.; Horner, J.S.; et al. Lubricant Effects on Articular Cartilage Sliding Biomechanics Under Physiological Fluid Load Support. Tribology Letters 2021, 69(2), 56. DOI: https://doi.org/10.1007/s11249-021-01430-0
- Zeng, Z.Q.; Shi, W.; Xu, R.X.; et al. The Tribological Behavior of Ar Ion Implanted Ultra-High Molecular Weight Polyethylene. Lubrication Engineering-Huangpu- 2008, 33(4), 67–69.
- Bhushan, B.; Wei, G.H.; Haddad, P. Friction and Wear Studies of Human Hair and Skin. Wear 2005, 259(7–12), 1012–1021. DOI: https://doi.org/10.1016/j.wear.2004.12.026
- Harris, K.L.; Pitenis, A.A.; Sawyer, W.G.; et al. PTFE Tribology and the Role of Mechanochemistry in the Development of Protective Surface Films. Macromolecules 2015, 48(11), 3739–3745. DOI: https://doi.org/10.1021/acs.macromol.5b00452
- Krick, B.A.; Ewin, J.J.; Blackman, G.S.; et al. Environmental Dependence of Ultra-Low Wear Behavior of Polytetrafluoroethylene (PTFE) and Alumina Composites Suggests Tribochemical Mechanisms. Tribology International 2012, 51, 42–46. DOI: https://doi.org/10.1016/j.triboint.2012.02.015
- Vail, J.R.; Krick, B.A.; Marchman, K.R.; et al. Polytetrafluoroethylene (PTFE) Fiber Reinforced Polyetheretherketone (PEEK) Composites. Wear 2011, 270(11–12), 737–741. DOI: https://doi.org/10.1016/j.wear.2010.12.003
- Krick, B.A.; Ewin, J.J.; McCumiskey, E.J. Tribofilm Formation and Run-In Behavior in Ultra-Low-Wearing Polytetrafluoroethylene (PTFE) and Alumina Nanocomposites. Tribology Transactions 2014, 57(6), 1058–1065. DOI: https://doi.org/10.1080/10402004.2014.933934
- Alam, K.I.; Garodia, A.; Bragaw, P.; et al. Independently Tuning Surface and Subsurface Reinforcement to Optimize PTFE Wear. Wear 2022, 510–511, 204516. DOI: https://doi.org/10.1016/j.wear.2022.204516
- Getuli, V.; Ventura, S.M.; Capone, P.; et al. BIM-based Code Checking for Construction Health and Safety. Procedia Engineering 2017, 196, 454–461. DOI: https://doi.org/10.1016/j.proeng.2017.07.224
- Ghaffarianhoseini, A.; Tookey, J.; Ghaffarianhoseini, A.; et al. Building Information Modelling (BIM) Uptake: Clear Benefits, Understanding Its Implementation, Risks and Challenges. Renewable and Sustainable Energy Review, 2017, 75, 1046–1053. DOI: https://doi.org/10.1016/j.rser.2016.11.083
- Guo, Y.; Yang, X.; Liu, C.; et al. Flexible Coordinate Measurement System Based on Robot for Industries. In 5th International Symposium on Advanced Optical Manufacturing and Testing Technologies: Optical Test and Measurement Technology and Equipment, SPIE, 2010, vol. 7656, pp. 1736–1743. DOI: https://doi.org/10.1117/12.865951
- Azhar, S. Building Information Modeling (BIM): Trends, Benefits, Risks, and Challenges for the AEC Industry. Leadership and Management in Engineering 2010, 11, 241–252. DOI: https://doi.org/10.1061/(ASCE)LM.1943-5630.0000127
- Bock, T. Construction Robotics. Autonomous Robots 2007, 22, 201–209. DOI: https://doi.org/10.1007/s10514-006-9008-5
- Boje, C.; Guerriero, A.; Kubicki, S.; et al. Towards a Semantic Construction Digital Twin: Directions for Future Research. Automation in Construction 2020, 114, 103179 DOI: https://doi.org/10.1016/j.autcon.2020.103179
- Teizer, J.; Blickle, A.; King, T.; et al. BIM for 3D Printing in Construction. In Building Information Modeling, Borrmann, A., König, M., Koch, C., Beetz, J. Eds.; Springer, Cham, Switzerland, 2018, pp. 421–446. DOI: https://doi.org/10.1007/978-3-319-92862-3_26
- Cai, S.; Ma, Z.; Skibniewski, M.J.; et al. Construction Automation and Robotics for High-rise Buildings Over the Past Decades: A Comprehensive Review. Advanced Engineering Informatics 2019, 42, 100989. DOI: https://doi.org/10.1016/j.aei.2019.100989
- Kasperzyk, C.; Kim, M.K.; Brilakis, I. Automated Re-prefabrication System for Buildings Using Robotics. Automation in Construction 2017, 83, 184–195. DOI: https://doi.org/10.1016/j.autcon.2017.08.002
- Lee, D.; Lee, S.H.; Masoud, N.; et al. Integrated Digital Twin and Blockchain Framework to Support Accountable Information Sharing in Construction Projects. Automation in Construction 2021, 127, 103688. DOI: https://doi.org/10.1016/j.autcon.2021.103688


