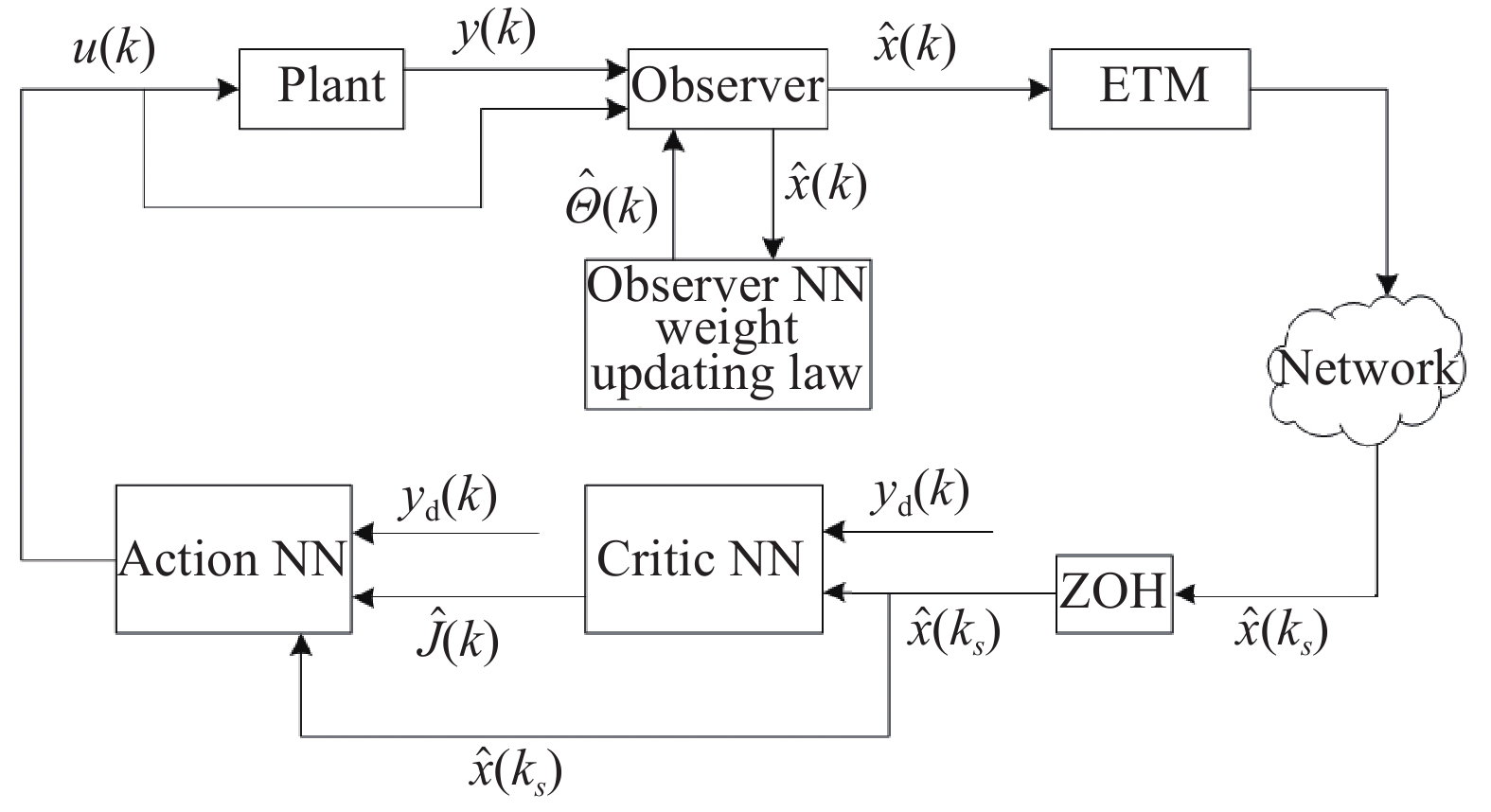
In this article, a novel event-triggered (ET) output-feedback optimal tracking control scheme is developed for a class of uncertain discrete-time nonlinear systems in the pure-feedback form with immeasurable states. Firstly, different from the traditional n-step-ahead input-output prediction model, the immeasurable states of the system are estimated in real time by designing a neural network (NN) state observer. Then, the implicit function theorem and the mean value theorem are combined to tackle the nonaffine terms. The variable substitution approach is applied to overcome the causal contradiction problem during the backstepping design, and meanwhile the n-step time delays caused by the traditional n-step-ahead prediction model are avoided. Subsequently, the critic NN and the action NN are employed to minimize the system long-term performance measure. Under the adaptive critic design framework, an optimal controller is designed to obtain the optimal control performance. Furthermore, an ET mechanism is embedded between sensors and controllers to reduce network burden. A novel ET condition is developed to save network resources and guarantee the desired tracking control performance. According to the Lyapunov stability analysis, all the closed-loop system signals are guaranteed to be uniformly ultimately bounded.
- Open Access
- Article
Adaptive Neural Event-Triggered Output-Feedback Optimal Tracking Control for Discrete-Time Pure-Feedback Nonlinear Systems
- Wei Wang 1,
- Min Wang 1, 2, *
Author Information
Received: 20 Dec 2023 | Accepted: 30 Jan 2024 | Published: 26 Jun 2024
Abstract
Graphical Abstract
Keywords
adaptive neural control | optimal control | event-triggered control | neural state observer | pure-feedback systems
References
- 1.Ferrara, A.; Giacomini, L. Control of a class of mechanical systems with uncertainties via a constructive adaptive/second order VSC approach. J. Dyn. Syst. Meas. Control, 2000, 122: 33−39. doi: 10.1115/1.482426
- 2.Dai, S.L.; He, S.D.; Ma, Y.F.; et al. Cooperative learning-based formation control of autonomous marine surface vessels with prescribed performance. IEEE Trans. Syst. Man Cybern. Syst., 2022, 52: 2565−2577. doi: 10.1109/TSMC.2021.3051335
- 3.Shao, S.Y.; Chen, M.; Zhang, Y.M. Adaptive discrete-time flight control using disturbance observer and neural networks. IEEE Trans. Neural Netw. Learn. Syst., 2019, 30: 3708−3721. doi: 10.1109/TNNLS.2019.2893643
- 4.Shi, H.T.; Wang, M.; Wang, C. Pattern-based autonomous smooth switching control for constrained flexible joint manipulator. Neurocomputing, 2022, 492: 162−173. doi: 10.1016/j.neucom.2022.04.031
- 5.Wang, M.; Wang, C. Learning from adaptive neural dynamic surface control of strict-feedback systems. IEEE Trans. Neural Netw. Learn. Syst., 2015, 26: 1247−1259. doi: 10.1109/TNNLS.2014.2335749
- 6.Huang, L.W.; Wang, M. Filter-based event-triggered adaptive fuzzy control for discrete-time MIMO nonlinear systems with unknown control gains. IEEE Trans. Fuzzy Syst., 2022, 30: 3673−3684. doi: 10.1109/TFUZZ.2021.3122231
- 7.Zhang, T.P.; Xia, M.Z.; Yi, Y. Adaptive neural dynamic surface control of strict-feedback nonlinear systems with full state constraints and unmodeled dynamics. Automatica, 2017, 81: 232−239. doi: 10.1016/j.automatica.2017.03.033
- 8.Wang, M.; Huang, L.W.; Yang, C.G. NN-based adaptive tracking control of discrete-time nonlinear systems with actuator saturation and event-triggering protocol. IEEE Trans. Syst. Man Cybern. Syst., 2021, 51: 7613−7621. doi: 10.1109/TSMC.2020.2981954
- 9.Wang, Z.S.; Liu, L.; Wu, Y.M.; et al. Optimal fault-tolerant control for discrete-time nonlinear strict-feedback systems based on adaptive critic design. IEEE Trans. Neural Netw. Learn. Syst., 2018, 29: 2179−2191. doi: 10.1109/TNNLS.2018.2810138
- 10.Sui, S.; Chen, C.L.P.; Tong, S.C. A novel adaptive NN prescribed performance control for stochastic nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst., 2021, 32: 3196−3205. doi: 10.1109/TNNLS.2020.3010333
- 11.Ge, S.S.; Wang, C. Adaptive NN control of uncertain nonlinear pure-feedback systems. Automatica, 2002, 38: 671−682. doi: 10.1016/S0005-1098(01)00254-0
- 12.Wang, Z.S.; Liu, L.; Zhang, H.G. Neural network-based model-free adaptive fault-tolerant control for discrete-time nonlinear systems with sensor fault. IEEE Trans. Syst. Man Cybern. Syst., 2017, 47: 2351−2362. doi: 10.1109/TSMC.2017.2672664
- 13.Chen, F.C.; Khalil, H.K. Adaptive control of a class of nonlinear discrete-time systems using neural networks. IEEE Trans. Autom. Control, 1995, 40: 791−801. doi: 10.1109/9.384214
- 14.Ge, S.S.; Li, G.Y.; Lee, T.H. Adaptive NN control for a class of strict-feedback discrete-time nonlinear systems. Automatica, 2003, 39: 807−819. doi: 10.1016/S0005-1098(03)00032-3
- 15.Ge, S.S.; Yang, C.G.; Lee, T.H. Adaptive predictive control using neural network for a class of pure-feedback systems in discrete time. IEEE Trans. Neural Netw., 2008, 19: 1599−1614. doi: 10.1109/TNN.2008.2000446
- 16.Li, S.; Li, D.P.; Liu, Y.J. Adaptive neural network tracking design for a class of uncertain nonlinear discrete-time systems with unknown time-delay. Neurocomputing, 2015, 168: 152−159. doi: 10.1016/j.neucom.2015.06.003
- 17.Wang, M.; Shi, H.T.; Wang, C.; et al. Dynamic learning from adaptive neural control for discrete-time strict-feedback systems. IEEE Trans. Neural Netw. Learn. Syst., 2022, 33: 3700−3712. doi: 10.1109/TNNLS.2021.3054378
- 18.Li, Y.N.; Yang, C.G.; Ge, S.S.;
et al . Adaptive output feedback NN control of a class of discrete-time MIMO nonlinear systems with unknown control directions.IEEE Trans. Syst. Man Cybern. Part B Cybern .2011 ,41 , 507–517. doi:10.1109/TSMCB.2010.2065223 - 19.Wang, M.; Wang, Z.D.; Dong, H.L.; et al. A novel framework for backstepping-based control of discrete-time strict-feedback nonlinear systems with multiplicative noises. IEEE Trans. Autom. Control, 2021, 66: 1484−1496. doi: 10.1109/TAC.2020.2995576
- 20.Wang, W.; Wang, M.; Dai, S.L. Adaptive neural event-triggered optimal tracking control for discrete-time pure-feedback systems. In
Proceedings of the 2023 42nd Chinese Control Conference (CCC ),Tianjin, 24–26 July 2023 ; IEEE: New York, 2023; pp. 2335–2340. doi: 10.23919/CCC58697.2023.10240434 - 21.Hu, J.; Zhang, H.X.; Liu, H.J.; et al. A survey on sliding mode control for networked control systems. Int. J. Syst. Sci., 2021, 52: 1129−1147. doi: 10.1080/00207721.2021.1885082
- 22.Wang, X.L.; Sun, Y.; Ding, D.R. Adaptive dynamic programming for networked control systems under communication constraints: A survey of trends and techniques. Int. J. Netw. Dyn. Intell., 2022, 1: 85−98. doi: 10.53941/ijndi0101008
- 23.Wang, Y.; Liu, H.J.; Tan, H.L. An overview of filtering for sampled-data systems under communication constraints. Int. J. Netw. Dyn. Intell., 2023, 2: 100011. doi: 10.53941/ijndi.2023.100011
- 24.Wang, Y.A.; Shen, B.; Zou, L.; et al. A survey on recent advances in distributed filtering over sensor networks subject to communication constraints. Int. J. Netw. Dyn. Intell., 2023, 2: 100007. doi: 10.53941/ijndi0201007
- 25.Xu, B.; Hu, J.; Jia, C.Q.; et al. State estimation via prediction-based scheme for linear time-varying uncertain networks with communication transmission delays and stochastic coupling. Syst. Sci. Control Eng., 2021, 9: 173−187. doi: 10.1080/21642583.2021.1888820
- 26.Saif, M.; Liu, B.; Fan, H.J. Stabilisation and control of a class of discrete-time nonlinear stochastic output-dependent system with random missing measurements. Int. J. Control, 2017, 90: 1678−1687. doi: 10.1080/00207179.2016.1219066
- 27.Liu, A.D.; Zhang, W.A.; Yu, L.; et al. New results on stabilization of networked control systems with packet disordering. Automatica, 2015, 52: 255−259. doi: 10.1016/j.automatica.2014.12.006
- 28.Tao, H.M.; Tan, H.L.; Chen, Q. W.; et al. H∞ state estimation for memristive neural networks with randomly occurring DoS attacks. Syst. Sci. Control Eng., 2022, 10: 154−165. doi: 10.1080/21642583.2022.2048322
- 29.Sun, Y.; Tian, X.; Wei, G.L. Finite-time distributed resilient state estimation subject to hybrid cyber-attacks: A new dynamic event-triggered case. Int. J. Syst. Sci., 2022, 53: 2832−2844. doi: 10.1080/00207721.2022.2083256
- 30.Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Autom. Control, 2007, 52: 1680−1685. doi: 10.1109/TAC.2007.904277
- 31.Li, Y.X.; Yang, G.H. Adaptive neural control of pure-feedback nonlinear systems with event-triggered communications. IEEE Trans. Neural Netw. Learn. Syst., 2018, 29: 6242−6251. doi: 10.1109/TNNLS.2018.2828140
- 32.Jin, X.; Li, Y.X.; Tong, S.C. Adaptive event-triggered control design for nonlinear systems with full state constraints. IEEE Trans. Fuzzy Syst., 2021, 29: 3803−3811. doi: 10.1109/TFUZZ.2020.3028645
- 33.Li, Y.X.; Yang, G.H. Model-based adaptive event-triggered control of strict-feedback nonlinear systems. IEEE Trans. Neural Netw. Learn. Syst., 2018, 29: 1033−1045. doi: 10.1109/TNNLS.2017.2650238
- 34.Guo, X.X.; Yan, W.S.; Cui, R.X. Event-triggered reinforcement learning-based adaptive tracking control for completely unknown continuous-time nonlinear systems. IEEE Trans. Cybern., 2020, 50: 3231−3242. doi: 10.1109/TCYB.2019.2903108
- 35.Wang, W.; Li, Y.M. Observer-based event-triggered adaptive fuzzy control for leader-following consensus of nonlinear strict-feedback systems. IEEE Trans. Cybern., 2021, 51: 2131−2141. doi: 10.1109/TCYB.2019.2951151
- 36.Li, W.; Liu, Y.G.; Cao, Z.R. Event-triggered sliding mode control for multi-agent systems subject to channel fading. Int. J. Syst. Sci., 2022, 53: 1233−1244. doi: 10.1080/00207721.2021.1995527
- 37.Li, Y.X.; Yang, G.H. Event-based adaptive NN tracking control of nonlinear discrete-time systems. IEEE Trans. Neural Netw. Learn. Syst., 2018, 29: 4359−4369. doi: 10.1109/TNNLS.2017.2765683
- 38.Wang, M.; Ou, F.H.; Shi, H.T.; et al. Model-based adaptive event-triggered tracking control of discrete-time nonlinear systems subject to strict-feedback form. IEEE Trans. Syst. Man Cybern. Syst., 2022, 52: 4557−4568. doi: 10.1109/TSMC.2021.3098025
- 39.Xu, W.Q.; Liu, X.P.; Wang, H.Q.; et al. Event-based adaptive NN controller design for strict-feedback discrete-time nonlinear systems with input dead zone and saturation. Int. J. Control, 2022, 95: 218−233. doi: 10.1080/00207179.2020.1788727
- 40.Wang, M.; Wang, Z.D.; Chen, Y.; et al. Adaptive neural event-triggered control for discrete-time strict-feedback nonlinear systems. IEEE Trans. Cybern., 2020, 50: 2946−2958. doi: 10.1109/TCYB.2019.2921733
- 41.Dong, C.; Ye, Q.Z.; Dai, S.L. Neural-network-based adaptive output-feedback formation tracking control of USVs under collision avoidance and connectivity maintenance constraints. Neurocomputing, 2020, 401: 101−112. doi: 10.1016/j.neucom.2020.03.033
- 42.Hassan, M.F.; Hammuda, M. Leader-follower formation control of mobile nonholonomic robots via a new observer-based controller. Int. J. Syst. Sci., 2020, 51: 1243−1265. doi: 10.1080/00207721.2020.1758233
- 43.Su, Y.F.; Cai, H.; Huang, J. The cooperative output regulation by the distributed observer approach. Int. J. Netw. Dyn. Intell., 2022, 1: 20−35. doi: 10.53941/ijndi0101003
- 44.Wang, M.; Huang, L.W.; Zhao, Z.J.; et al. Observer-based adaptive neural output-feedback event-triggered control for discrete-time nonlinear systems using variable substitution. Int. J. Robust Nonlinear Control, 2021, 31: 5541−5562. doi: 10.1002/rnc.5530
- 45.Wang, M.; Wang, K.N.; Huang, L.W.; et al. Observer-based event-triggered tracking control for discrete-time nonlinear systems using adaptive critic design. IEEE Trans. Syst. Man Cybern. Syst., 2023, 53: 5393−5403. doi: 10.1109/TSMC.2023.3269108
- 46.Wang, D. Research progress on learning-based robust adaptive critic control.
Acta Autom. Sin .2019 ,45 , 1031–1043 (in Chinese). doi: 10.16383/j.aas.c170701 - 47.Werbos, P.J. Approximate dynamic programming for real-time control and neural modeling. In
Proceedings of Handbook of Intelligent Control: Neural, Fuzzy, and Adaptive Approaches, New York ; Van Nostrand Reinhold, 1992. - 48.Wang, D.; Liu, D.R.; Wei, Q.L.; et al. Optimal control of unknown nonaffine nonlinear discrete-time systems based on adaptive dynamic programming. Automatica, 2012, 48: 1825−1832. doi: 10.1016/j.automatica.2012.05.049
- 49.Dong, L.; Zhong, X.N.; Sun, C.Y.; et al. Adaptive event-triggered control based on heuristic dynamic programming for nonlinear discrete-time systems. IEEE Trans. Neural Netw. Learn. Syst., 2017, 28: 1594−1605. doi: 10.1109/TNNLS.2016.2541020
- 50.Wen, G.X.; Niu, B. Optimized tracking control based on reinforcement learning for a class of high-order unknown nonlinear dynamic systems. Inf. Sci., 2022, 606: 368−379. doi: 10.1016/j.ins.2022.05.048
- 51.Li, Y.M.; Fan, Y.L.; Li, K.W.; et al. Adaptive optimized backstepping control-based RL algorithm for stochastic nonlinear systems with state constraints and its application. IEEE Trans. Cybern., 2022, 52: 10542−10555. doi: 10.1109/TCYB.2021.3069587
- 52.Liu, Y.J.; Gao, Y.; Tong, S.C.; et al. Fuzzy approximation-based adaptive backstepping optimal control for a class of nonlinear discrete-time systems with dead-zone. IEEE Trans. Fuzzy Syst., 2016, 24: 16−28. doi: 10.1109/TFUZZ.2015.2418000
- 53.Li, H.Y.; Wu, Y.; Chen, M. Adaptive fault-tolerant tracking control for discrete-time multiagent systems via reinforcement learning algorithm. IEEE Trans. Cybern., 2021, 51: 1163−1174. doi: 10.1109/TCYB.2020.2982168
- 54.Tang, L.; Liu, Y.J.; Chen, C.L.P. Adaptive critic design for pure-Feedback discrete-time MIMO systems preceded by unknown backlashlike hysteresis. IEEE Trans. Neural Netw. Learn. Syst., 2018, 29: 5681−5690. doi: 10.1109/TNNLS.2018.2805689
- 55.Wang, M.; Wang, L.X.; Yang, C.G. Sliding mode differentiator-based event-triggered control for state-constrained nonlinear systems with unknown virtual control coefficients. Int. J. Control, 2023, 96: 599−613. doi: 10.1080/00207179.2021.2005828
- 56.Deng, C.; Wen, C.Y. Distributed resilient observer-based fault-tolerant control for heterogeneous multiagent systems under actuator faults and DOS attacks. IEEE Trans. Control Netw. Syst., 2020, 7: 1308−1318. doi: 10.1109/TCNS.2020.2972601
- 57.Wang, M.; Shi, H.T.; Wang, C.; et al. Neural learning control for discrete-time nonlinear systems in pure-feedback form. Sci. China Inf. Sci., 2022, 65: 122206. doi: 10.1007/s11432-020-3138-7
How to Cite
Wang, W.; Wang, M. Adaptive Neural Event-Triggered Output-Feedback Optimal Tracking Control for Discrete-Time Pure-Feedback Nonlinear Systems. International Journal of Network Dynamics and Intelligence 2024, 3 (2), 100010. https://doi.org/10.53941/ijndi.2024.100010.
RIS
BibTex
Copyright & License

Copyright (c) 2024 by the authors.
This work is licensed under a Creative Commons Attribution 4.0 International License.
Contents
References
 Suite 4002 Level 4, 447 Collins Street, Melbourne, Victoria 3000, Australia
Suite 4002 Level 4, 447 Collins Street, Melbourne, Victoria 3000, Australia General Inquiries: info@sciltp.com
General Inquiries: info@sciltp.com