Articles
Intelligence & Control
Adaptive Fixed-Time Sliding Mode Tracking Control of Underactuated AUVs with Flexible Prescribed Performance
Gaofeng Fan, Ying Zhao, Shuanghe Yu
2026, 2(2): 4. doi: 10.53941/ic.2026.100007
Tudor Hirtopanu, Zidong Wang, Alan Serrano, Weibo Liu
2026, 2(2): 3. doi: 10.53941/ic.2026.100006
Hopf Bifurcation and Stability Analysis of a Fractional-Order Lotka-Volterra Predator-PreyModel with Two Delays
Mengfan Zhu, Zunshui Cheng, Youming Xin, Yun Shang, Xue Lin, Jinde Cao
2026, 2(2): 2. doi: 10.53941/ic.2026.100005
Look-Ahead-Look-Back Hindsight Experience Replay for Motion Planning of Spherical Multi-Telescopic-Legged Robots
Xinyun Liu, Fengde Xu, Xudong Zhao
2026, 2(2): 1. doi: 10.53941/ic.2026.100004
Observer-Based Finite-Horizon H∞ Consensus Control of Multi-Agent Systems under Multi-Round-Robin Scheduling
Jiaxin Chen, Yezheng Wang, Fan Wang
2026, 2(1): 3. doi: 10.53941/ic.2026.100003
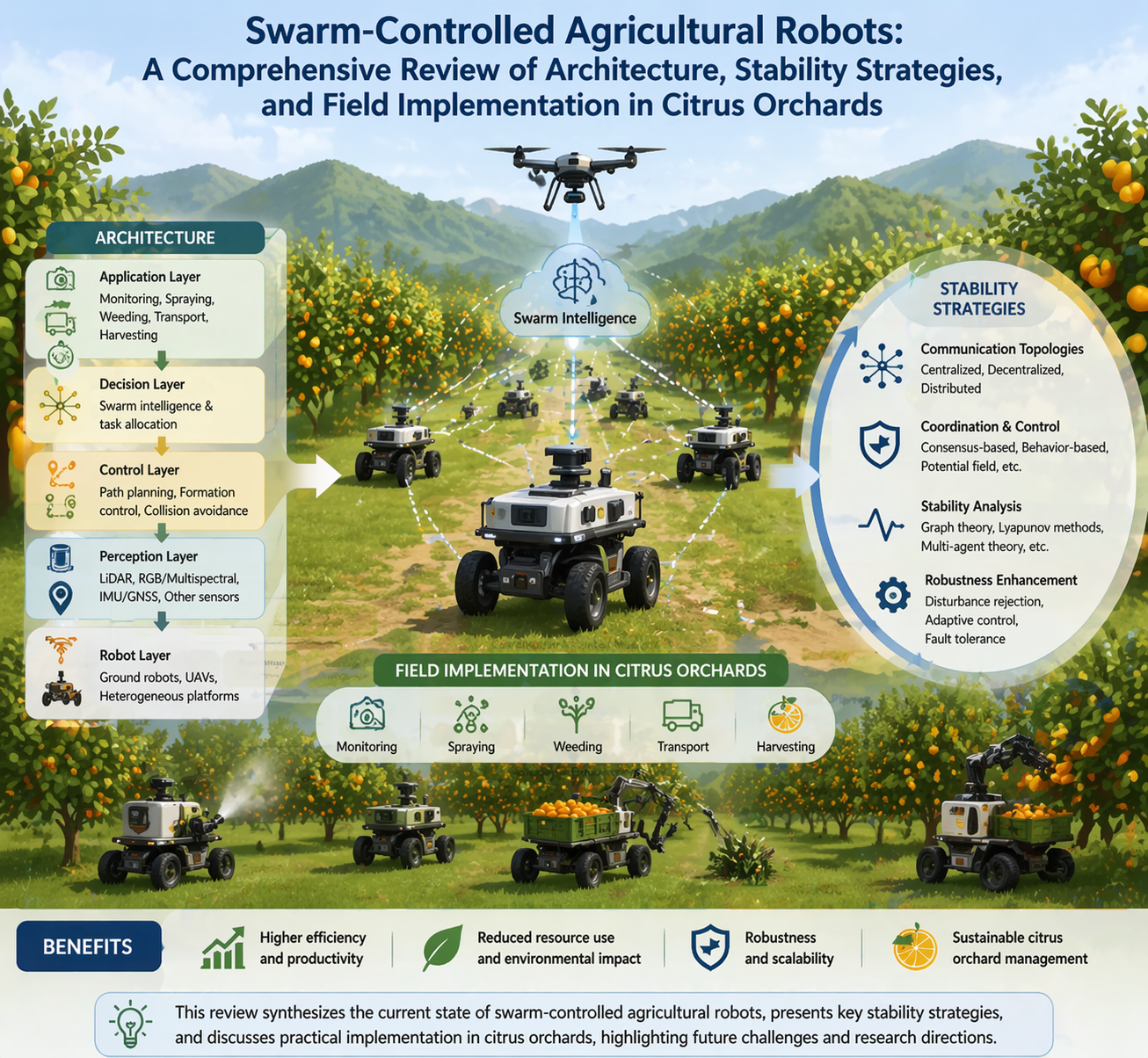
Swarm-Controlled Agricultural Robots: A Comprehensive Review of Architecture, Stability Strategies, and Field Implementation in Citrus Orchards
Wei Ma, Yuepeng Song, Yongqiang Zheng, Zhiwei Tian
2026, 2(1): 2. doi: 10.53941/ic.2026.100002
A Low-Cost Robotic Platform for Radiation Mapping
Haori Yang, Joshua Handley, William Younger
2026, 2(1): 1. doi: 10.53941/ic.2026.100001
Acknowledgment to Reviewers
Intelligence & Control Editorial Office
2025, 1(1): 6. doi: 10.53941/ic.2025.100006
Filter-Based Adaptive Fuzzy Control for an Uncertain Robotic Manipulator with Intermittent Input and Output Triggering
Jihang Sui, Alain Martinez, Ben Niu, Yunfei Mu, Deepak Kumar Jain, Dmytro Zubov
2025, 1(1): 5. doi: 10.53941/ic.2025.100005
Fast Finite-Time Adaptive Consensus with Prescribed Performance Tracking Control for High-Power Nonlinear MASs
Xiao Zheng, Yuanzhao Chen, Xiaomei Wang, Xiaoqing Zhang, Yi Niu
2025, 1(1): 4. doi: 10.53941/ic.2025.100004
Tingting Shi, Cheng Hu, Juan Yu
2025, 1(1): 3. doi: 10.53941/ic.2025.100003
Xinyu He, Jianwen Huo, Rui Lin
2025, 1(1): 2. doi: 10.53941/ic.2025.100002
Yang Liu, Shuoshuo Liu, Ning Xu, Xudong Zhao
2025, 1(1): 1. doi: 10.53941/ic.2025.100001
 Suite 4002 Level 4, 447 Collins Street, Melbourne, Victoria 3000, Australia
Suite 4002 Level 4, 447 Collins Street, Melbourne, Victoria 3000, Australia General Inquiries: info@sciltp.com
General Inquiries: info@sciltp.com